2 Physische Straßeninfrastruktur
2.1 Gesonderte Fahrspuren für vernetzte und automatisierte Fahrzeuge
Synonyme
vernetzte und automatisierte Fahrzeuge (CAV - connected and automated vehicles), AV-eigene Fahrspuren (AV-dedicated lanes), AV-eigene Korridore (dedicated corridors)
Definition
Dedizierte Fahrspuren für vernetzte und automatisierte Fahrzeuge verfügen über zusätzliche Infrastruktur oder Sensoren, um die Zuverlässigkeit von fortschrittlichen Fahrerassistenzsystemen (ADAS) zu erhöhen. Auf diesen Fahrspuren dürfen nur vollständig automatisiert fahrende Fahrzeuge fahren. Zu den typischen Anwendungen gehören kooperative und adaptive Geschwindigkeitsregelung auf der Grundlage von Sensoren mit der Infrastruktur, Spurhaltung, Optimierung des Kraftstoffverbrauchs und Möglichkeiten der Straßenbenutzung (Broek et al., 2011). Es wird erwartet, dass die Einführung von Sonderfahrspuren für CAV direkte Auswirkungen auf den Verkehrsfluss auf den Autobahnen und im nahen gelegenen Straßennetz haben wird. So zeigte eine in Singapur durchgeführte Studie, dass dedizierte Fahrspuren auf Autobahnen die Fahrzeit von CAVs um etwa 25 % verkürzen können (wenn die Auslastung der Fahrspur nicht erreicht wird) - auf Kosten einer Verzögerung von etwa 7 % für konventionelle Fahrzeuge aufgrund der geringeren Kapazität (Ivanchev et al., 2017). Es wurde auch nachgewiesen, dass sie sich positiv auf den Kraftstoffverbrauch auswirken.
Darüber hinaus erhöhte sich der Durchsatz, definiert als Anzahl der Fahrzeuge, die die Straße in einem bestimmten Zeitintervall passieren, infolge der Einführung von speziellen Fahrspuren für AVs (Kumar et al., 2020). Dieser Effekt war jedoch mit einem Rückgang des Durchsatzes auf kleineren Straßen verbunden, da AVs aufgrund der Zeitersparnis Autobahnen bevorzugen, was wiederum zu Zeitverlusten für konventionelle Autos führen kann. Darüber hinaus können die Vorteile einer erhöhten Kapazität von reinen AV-Fahrspuren durch die Festlegung höherer Geschwindigkeitsbegrenzungen für diese Fahrspuren noch verstärkt werden (Ye & Yamamoto, 2018). In Bezug auf die Nachfrage nach verschiedenen Straßentypen ergab die Studie, dass die Einführung dedizierter AV-Spuren die Nachfrage konventioneller Fahrzeuge nach Hauptverkehrsstraßen (die jedoch kleiner als Autobahnen sind) und Nebenstraßen als Ersatz für stärker überlastete Autobahnen erhöhen wird.
Im Gegensatz dazu hat die Studie von Chen et al. (2016) gezeigt, dass die Einführung von AV-Spuren das Potenzial hat, die Verkehrskapazität auf diesen Spuren in einem Mischverkehrskontext zu maximieren, während sie praktisch keine Auswirkungen auf die konventionelle Verkehrskapazität hat. Um die dedizierten Fahrspuren für CAVs effizient zu nutzen, die in der Anfangsphase möglicherweise nicht ausreichend ausgelastet sind, wird vorgeschlagen, konventionellen Fahrzeugen die Einfahrt in die reinen Fahrspuren für AVs nach Zahlung der Maut zu ermöglichen. Diese Lösung basiert auf den derzeit weltweit genutzten HOV-Spuren (High Occupancy Vehicle). Es wird behauptet, dass dieser gemeinsame Ansatz den Durchsatz auf einzelnen Straßen und die Verteilung des Verkehrsflusses im gesamten Netz verbessert (Liu & Song, 2019).
Wichtige Interessensgruppen
- Betroffene: Fahrer:innen konventioneller Autos, Autohersteller, Versicherungen
- Verantwortlich: Straßeninfrastruktur-Agenturen, lokale und nationale Regierungen
Aktueller Stand der Wissenschaft und Forschung
Die derzeitige Forschung konzentriert sich darauf, die Auswirkungen der Einführung von Standspuren auf den Verkehrsfluss, die Akzeptanz des Fahrerverhaltens, die Sicherheit und die Effizienz zu ermitteln. Darüber hinaus werden die Faktoren, die diese beeinflussen, analysiert, indem verschiedene Entwurfs- und Betriebskonfigurationen, Straßentypen und Nutzungsstrategien getestet werden (Rad et al., 2020). Es wurden sowohl Feldversuche als auch Studien an Fahrsimulatoren durchgeführt, um den Einfluss verschiedener Designs dedizierter Fahrspuren auf Fahrer:innen in konventionellen Fahrzeugen und solchen mit einem gewissen Grad an Automatisierung zu untersuchen (Guin et al., 2008, Zhong, 2018). Insbesondere wurden in einer Reihe von Studien verschiedene Arten von Fahrspuren verglichen (Zhong, 2018, Yang et al., 2019). Sie zeigten, dass Standspuren mit beschränktem Zugang in Bezug auf Fahrzeit und Durchsatz besser abschnitten als Standspuren mit durchgehendem Zugang. Darüber hinaus war die Wahrscheinlichkeit, dass Fahrzeuge in einem Zug fahren, auf separaten Fahrspuren mit begrenztem Zugang deutlich höher. Andererseits wurde gezeigt, dass die Kollisionsraten in der Nähe der Ein- oder Ausfahrt dieser Fahrspuren mit beschränktem Zugang höher sind (Rad et al. 2020).
Aktueller Stand der praktischen Umsetzung
Derzeit plant der Bundesstaat Michigan zusammen mit mehreren privaten Partnern, darunter Ford und Alphabet Inc., 65 km einer Autobahn zwischen Detroit und Ann Arbor für den ausschließlichen Verkehr von vollständig automatisierten Fahrzeugen, einschließlich Bussen und Shuttles, zu reservieren (Krisher & Eggert, 2020). Ähnliche Initiativen gibt es auch in anderen Ländern. So plant China den Bau einer fast 100 km langen achtspurigen Autobahn zwischen Peking und der Xiongan New Area, von der zwei Fahrspuren für den vollständig automatisierten Verkehr vorgesehen sind. Der Abschluss der Bauphase ist für Ende 2020 vorgesehen, während die Eröffnung für den Verkehr im Juni 2021 erwartet wird (Syncedreview.com, 2020). In Europa läuft derzeit das Projekt SHOW (SHared automation Operating models for Worldwide adoption), das den Einsatz von etwa siebzig vollständig automatisierten Fahrzeugen in 21 europäischen Städten vorsieht. Um zu prüfen, wie sie am besten integriert werden können, werden die Fahrzeuge in verschiedenen Umgebungen im gemischten Verkehr und auf speziellen Fahrspuren eingesetzt. Aus Sicherheitsgründen wird der Fahrer jedoch an Bord sein (CORDIS, 2020).
Auswirkungen in Bezug auf die Ziele für nachhaltige Entwicklung (SDGs)
| Ebene der Auswirkungen | Indikator | Richtung der Auswirkungen | Beschreibung des Ziels & SDG | Quelle |
|---|---|---|---|---|
| Individuell | Geringerer Kraftstoffverbrauch | + | Oekologische Nachhaltigkeit (7,12,13,15) | Ivanchev et al., 2017 |
| Individuell | Verkuerzte Reisezeit | + | Nachhaltige wirtschaftliche Entwicklung (8,11) | Zhong, 2018; Yang et al., 2019 |
| Systemisch | Kollisionsrate reduziert | + | Gesundheit und Wohlbefinden (3) | Zhang et al., 2020 |
| Systemisch | Emissionsrate reduziert | + | Oekologische Nachhaltigkeit (7,12,13,15) | Al Alam at al., 2010 |
| Systemisch | Verkehrsstaus | ~ | Nachhaltige wirtschaftliche Entwicklung (8,11) | Ivanchev et al., 2017; Kumar et al., 2020 |
| Systemisch | Neuartige Designs getestet | + | Innovation und Infrastruktur (9) | Guin et al., 2008; Zhong, 2018; Krisher & Eggert, 2020 |
| Systemisch | SHOW EU Initiative | + | Partnerschaften und Kooperationen (17) | CORDIS, 2020 |
Stand der Technologischen und der Gesellschaftlichen Bereitschaft
| Stand der Technologiebereitschaft | Gesellschaftlicher Bereitschaftsgrad |
|---|---|
| 5-6 | 1-3 |
Offene Fragen
- Welches sind die potenziellen Vorteile von dedizierten AV-Spuren in Verbindung mit intelligenten Platooning-Strategien?
- Wie und in welchem Ausmaß werden gemeinsame Konzepte von Automobilsektor, Flotte und Straßenbetreibern das Verkehrsmanagement verbessern und dynamische Verkehrsregelungen auch über Grenzen hinweg?
- Was sind die Rollen und Verantwortlichkeiten der verschiedenen Akteure der physischen Infrastruktur für vernetzte und automatisierte Fahrzeuge?
- Sollte das Fahrzeug mit jeder Straßeninfrastruktur zurechtkommen, und wenn nicht, welche Anforderungen können gestellt werden, um die bestehende Infrastruktur anzupassen?
- Wie kann die Kontinuität zwischen diesen verschiedenen Umgebungen sichergestellt werden?
- Welche Instrumente (z. B. mikro- und makroskopische Verkehrsmodellierung, Folgenabschätzung) können Städte in die Lage versetzen, die Auswirkungen vollständig automatisierter Fahrzeuge auf ihre physische Straßeninfrastruktur zu bewerten und die Bedürfnisse der vollständig automatisierten Fahrzeuge mit den Bedürfnissen der bestehenden Verkehrsträger (konventionelle Fahrzeuge, öffentliche Verkehrsmittel, Fußgänger:innen und Radfahrer:innen) abwägen. (ERTRAC, 2019)
Weitere links
Referenzen
- Al Alam, A., Gattami, A., & Johansson, K. H. (2010, September). An experimental study on the fuel reduction potential of heavy duty vehicle platooning. In 13th International IEEE Conference on Intelligent Transportation Systems (pp. 306-311). IEEE.
- Broek, S. M., van Nunen, E., & Zwijnenberg, H. (2011). Definition of necessary vehicle and infrastructure systems for automated driving.
- Chen, Z., He, F., Zhang, L., & Yin, Y. (2016). Optimal deployment of autonomous vehicle lanes with endogenous market penetration. Transportation Research Part C: Emerging Technologies, 72, 143-156.
- CORDIS | European Commission. (20 Apr 2020). Available at: https://cordis.europa.eu/project/id/875530 [Accessed: 13 November 2020].
- ERTRAC Working Group. (2019). Connected Automated Driving Roadmap. version, 8, 2019-08.
- Guin, A., Hunter, M., & Guensler, R. (2008). Analysis of reduction in effective capacities of high-occupancy vehicle lanes related to traffic behavior. Transportation Research Record, 2065(1), 47-53.
- Ivanchev, J., Knoll, A., Zehe, D., Nair, S., & Eckhoff, D. (2017). Potentials and implications of dedicated highway lanes for autonomous vehicles. arXiv preprint arXiv:1709.07658.
- Krisher, T., & Eggert, D. (14 Aug 2020). Michigan plans dedicated road lanes for autonomous vehicles. Available at: https://abcnews.go.com/Technology/wireStory/michigan-plans-dedicated-road-lanes-autonomous-vehicles-72352758 [Accessed: 12 November 2020].
- Kumar, A., Guhathakurta, S., & Venkatachalam, S. (2020). When and where should there be dedicated lanes under mixed traffic of automated and human-driven vehicles for system-level benefits?. Research in Transportation Business & Management, 100527.
- Liu, Z., & Song, Z. (2019). Strategic planning of dedicated autonomous vehicle lanes and autonomous vehicle/toll lanes in transportation networks. Transportation Research Part C: Emerging Technologies, 106, 381-403.
- Rad, S. R., Farah, H., Taale, H., van Arem, B., & Hoogendoorn, S. P. (2020). Design and operation of dedicated lanes for connected and automated vehicles on motorways: A conceptual framework and research agenda. Transportation Research Part C: Emerging Technologies, 117, 102664.
- Syncedreview.com (31 Aug 2020). Beijing Builds 100km Highway Lanes for Self-Driving Cars with Unmanned Machineries. Available at: https://syncedreview.com/2020/08/31/beijing-builds-100km-highway-lanes-for-self-driving-cars-with-unmanned-machineries/ [Accessed: 12 November 2020].
- Yang, D., Farah, H., Schoenmakers, M. J., & Alkim, T. (2019). Human drivers behavioural adaptation when driving next to a platoon of automated vehicles on a dedicated lane and implications on traffic flow: a driving simulator and microscopic simulation study in the Netherlands. In 98th Annual Meeting of the Transportation Research Board (pp. 19-00582).
- Ye, L., & Yamamoto, T. (2018). Impact of dedicated lanes for connected and autonomous vehicle on traffic flow throughput. Physica A: Statistical Mechanics and its Applications, 512, 588-597.
- Zhang, J., Wu, K., Cheng, M., Yang, M., Cheng, Y., & Li, S. (2020). Safety Evaluation for Connected and Autonomous Vehicles’ Exclusive Lanes considering Penetrate Ratios and Impact of Trucks Using Surrogate Safety Measures. Journal of advanced transportation, 2020.
- Zhong, Z. (2018). Assessing the effectiveness of managed lane strategies for the rapid deployment of cooperative adaptive cruise control technology.
2.2 Operative Gestaltungsbereiche (Operational design domains)
Synonyme
ODD
Definition
Operational Design Domain (ODD) ist ein System zur Bewertung der Bedingungen, unter denen ein automatisiertes Fahrsystem (automated driving system - ADS) auf der Grundlage von Fahrbahnmerkmalen oder des Verkehrsaufkommens sicher arbeiten kann (Czarnecki, 2018). Es ist ein Schlüssel zur Sicherheit von automatisierten Fahrzeugen, und ODD ist dazu da, die Grenzen für das Fahren auf verschiedenen Automatisierungsstufen eines Fahrzeugs zu definieren (Eliot, 2019). Zum Beispiel hat die Automatisierungsstufe 5 eine uneingeschränkte ODD, was bedeutet, dass sie der Steuerung des Fahrzeugs durch einen menschlichen Fahrer:innen gleichkommt. Bei den Stufen 1-4 unterliegt die ODD Beschränkungen in Bezug auf (Czarnecki, 2018):
- Straßenumgebung: einschließlich, aber nicht beschränkt auf städtische und ländliche Straßen, Autobahnen, Kreisverkehre, Tunnel, Verkehrsaufkommen, Baustellen oder unterschiedliche Wetter- oder Sichtbedingungen
- Zustand des Fahrzeugs: z. B. Beladungsgrenzen oder Mindestfüllstand der Reifen
- Verhalten des mit ADS ausgerüsteten Fahrzeugs: z. B. Geschwindigkeitsbegrenzungen oder Beschränkungen für mögliche Fahrmanöver
Im Allgemeinen bewertet ODD die Bedingungen, ob das Fahrzeug in der Lage ist, auf der gewählten Strecke und dem gegebenen Automatisierungsgrad automatisiert zu fahren. Stellt das System irgendwann fest, dass die Bedingungen für automatisiertes Fahren nicht geeignet sind, findet ODD einfach eine Stelle, an der das Fahrzeug angehalten werden kann, und Fahrer:innen müssen selbst das Steuer übernehmen und losfahren.
Der ODD arbeitet auf der Grundlage des operationellen Weltmodells (OWM), das aus dem operationellen Straßenumgebungsmodell (operational road environment model - OREM), dem Modell des betreffenden Fahrzeugs (subject vehicle(s) model - SVM) und dem ADS besteht. OREM repräsentiert alle relevanten Annahmen über die Straßenumgebung, in der ein ADS betrieben wird, während die irrelevanten ignoriert werden. SVM repräsentiert ein Fahrzeug, das von dem entwickelten ADS betrieben wird. Das OMW kann ein einzelnes Fahrzeug oder mehrere Fahrzeuge umfassen, die mit demselben oder verschiedenen ADS ausgestattet sind. Die Einbeziehung verschiedener ADS kann notwendig sein, um die Interaktion zwischen verschiedenen Fahrzeugtypen wie Bussen und Personenkraftwagen oder denselben Fahrzeugtypen mit unterschiedlichem ADS-Entwicklungsstand darzustellen.
Darüber hinaus führen Koopman und Fratrik (2019) eine Liste von Faktoren an, die für die Validierung und den Betrieb automatisierter Fahrzeuge und folglich für die Entwicklung von ODD als relevant erachtet werden. Dazu gehören:
- Betriebliches Terrain
- Wetterbedingungen
- Betriebliche Infrastruktur
- Einsatzregeln und Interaktion mit der Umgebung und anderen Verkehrsteilnehmer:innen
- Überlegungen zum Einsatz in mehreren Regionen
- Datenverfügbarkeit und Aktualität (z. B. in Bezug auf vorübergehende Änderungen der Verkehrsregeln)
- Erwartete Elemente des operativen Raumzustands (z. B. was sollte in den Anwendungsbereich von ODD einbezogen werden)
Darüber hinaus bezieht sich Object and Event Detection and Response (OEDR) auf den Betrieb innerhalb des Geltungsbereichs einer definierten ODD in Bezug auf Objekte und Ereignisse. Zu den Objektfaktoren gehören:
- Fähigkeit, relevante Objekte in der Umgebung zu erkennen und zu klassifizieren
- Verarbeitung und Schwellenwertbildung von Sensordaten
- Charakterisierung möglicher Betriebsparameter anderer Verkehrsteilnehmer:innen
- Permanente (Bäume, Bordsteine usw.) und temporäre (z. B. Menschen, Überschwemmungen) Hindernisse
- Gefährdete Bevölkerung
- Alle Arten von anderen Verkehrsteilnehmer:innen, einschließlich von Menschen gesteuerter und automatisierter Fahrzeuge sowie von Spezialfahrzeugen und Flugzeugen
Darüber hinaus beziehen sich die Ereignisfaktoren auf: - Bestimmung des Verhaltens anderer Objekte - ‘Normale’ Bewegung von Objekten - ‘Anormale’ Bewegung von Objekten - Ausbleiben der Bewegung anderer Objekte - Interaktionen des/der Fahrer:in vor, während und nach dem Einsatz des automatisierten Systems - Menschliche und nicht-menschliche Interaktionen
Wichtige Interessensgruppen
- Betroffene: Fahrer:innen konventioneller Autos, Autohersteller, Nutzer:innen von AVs
- Verantwortlich: Stadtverwaltungen, Autohersteller, Versicherungsanbieter
Aktueller Stand der Wissenschaft und Forschung
Die aktuelle Forschung konzentriert sich auf die Validierung, die Erweiterung der Fähigkeiten und die Verbesserung der Genauigkeit der derzeitigen ODD-Systeme. Lee et al. (2020) schlagen beispielsweise einen Ansatz zur Ermittlung einer ODD für das ADS anhand von statistischen Daten und Risikotoleranz vor. Die ermittelte ODD basiert auf der geografischen Zuordnung des mit dem ADS-Betrieb verbundenen Risikoniveaus, das unter der für eine bestimmte Umweltbedingung vordefinierten Risikoschwelle liegt. Daher ermöglicht diese Methode die Berücksichtigung von Sicherheitsbedenken durch die Festlegung von geografischen und umweltbedingten Einschränkungen für den ADS-Betrieb. Darüber hinaus untersuchten Farah et al. (2020) das Verständnis von ODD (in Bezug auf das Halten der Fahrspur) durch menschliche Fahrer:innen, von denen erwartet wird, dass sie das Fahrzeug in Situationen außerhalb der vom Hersteller angegebenen ODD steuern. Ein Unterschied zwischen dem Verständnis der Fahrer:innen für die Fähigkeiten des AV und dem Handbuch des Herstellers kann zu ernsthaften Sicherheitsproblemen führen. Sie führten einen Feldtest mit einem Tesla Model S durch, der auf Situationen innerhalb und außerhalb der vom Hersteller angegebenen ODD basierte. Farah et al. (2020) fanden eine Diskrepanz zwischen der vom Hersteller angegebenen ODD und der Wahrnehmung der Fahrer:innen, was die ODD umfasst. Insbesondere wurden Situationen, die außerhalb des Geltungsbereichs der ODD lagen, von menschlichen Fahrer:innen häufig als innerhalb des ODD-Bereichs liegend eingestuft. Diese Studie hat gezeigt, dass die ODD klarer beschrieben und spezifiziert werden muss, um die Diskrepanz zwischen dem Bewusstsein der Fahrer:innen und den tatsächlichen Fähigkeiten des Fahrzeugs zu verringern.
Aktueller Stand der praktischen Umsetzung
Kalifornien ist einer der Pionierstaaten, die Versuche zur Erprobung von ODD durchführen. Eines der Beispiele ist das aktuelle Google-Projekt des fahrerlosen Testwagens von Waymo Waymo’s. Es verwendet eine vierte Stufe des automatisierten Fahrsystems und zeigt die Verwendung von ODD im wirklichen Leben. Das ODD von Waymo arbeitet in einem bestimmten geografischen Gebiet (einem Teil Kaliforniens) 24 Stunden am Tag. Waymos ODD kann bis zu 105 km/h erreichen, funktioniert aber nicht bei Schnee oder Regen. Ansonsten gibt es in den USA keine landesweite Regelung für den Einsatz von ODD, da diese sehr ortsabhängig sind. Andere Regionen der Welt arbeiten an eigenen Regelungen für ODDs, wie z. B. MLIT-Guidline in Japan, Transport Canada in Kanada, NHTSA FAVP 3.0 in den USA oder EG-Richtlinien in Europa. Darüber hinaus hat die informelle Arbeitsgruppe der Vereinten Nationen für funktionale Anforderungen für AVs (FRAV) einen [Bericht] (https://unece.org/fileadmin/DAM/trans/doc/2020/wp29grva/GRVA-05-40e.pdf) zur Regelung der funktionalen Leistungsanforderungen für automatisierte Fahrsysteme und mit solchen Systemen ausgestattete Fahrzeuge vorgelegt.
Relevante Initiativen in Österreich
Auswirkungen in Bezug auf die Ziele für nachhaltige Entwicklung (SDGs
| Ebene der Auswirkungen | Indikator | Richtung der Auswirkungen | Beschreibung des Ziels & SDG | Quelle |
|---|---|---|---|---|
| Systemisch | Mehr Sicherheit fuer automatisierte Fahrzeuge angestrebt | + | Gesundheit und Wohlbefinden (3) | Koopman and Fratrik, 2019 |
| Systemisch | Entwicklung vollstaendig automatisierter Autos | + | Innovation und Infrastruktur (9) | Waymo, 2019 |
Stand der Technologiebereitschaft und Gesellschaftlicher Bereitschaftsgrad
| TRL | SRL |
|---|---|
| 5-6 | 4-6 |
Offene Fragen
- Welchen Einfluss hat die Entwicklung von ODD auf den Markt für automatisierte Fahrzeuge für den Durchschnittsfahrer?
Referenzen
- Berman, B., 2019. Autonomous vehicle operation design domain is key to safety. Sae.org. Available at: https://www.sae.org/news/2019/11/odds-for-av-testing [Accessed: 2 August 2021].
- Czarnecki, K. (2018). Operational Design Domain for Automated Driving Systems - Taxonomy of Basic Terms. 10.13140/RG.2.2.18037.88803.
- Eliot, L., 2019. Key To Driverless Cars, Operational Design Domains (ODD), Here’s What They Are, Woes Too. Medium. Available at: https://lance-eliot.medium.com/key-to-driverless-cars-operational-design-domains-odd-heres-what-they-are-woes-too-a0f1059e0bdb [Accessed: 2 August 2021].
- Farah, H., Bhusari, S., Van Gent, P., Babu, F. A. M., Morsink, P., Happee, R., & van Arem, B. (2020). An empirical analysis to assess the operational design domain of lane keeping system equipped vehicles combining objective and subjective risk measures. IEEE Transactions on Intelligent Transportation Systems, 22(5), 2589-2598.
- Koopman, P. and Fratrik, F., (2019). How Many Operational Design Domains, Objects, and Events?. Ceur-ws.org. Available at: http://ceur-ws.org/Vol-2301/paper_6.pdf [Accessed: 2 August 2021].
- Law Insider. (2021). Operational design domain Definition | Law Insider. Available at: https://www.lawinsider.com/dictionary/operational-design-domain [Accessed: 2 August 2021].
- Lee, C., Nayeer, N., Garcia, D., Agrawal, A. and Liu, B., 2020. Identifying the Operational Design Domain for an Automated Driving System through Assessed Risk. 2020 IEEE Intelligent Vehicles Symposium (IV).
- Waymo. 2019. Waymo. Available at: https://waymo.com/ [Accessed: 2 August 2021].
2.3 Informationssystem für Bahnübergänge
Synonyme
Bahnübergänge (rail level crossings - RLX), erhöhte Bahnübergänge (raised level crossings - RC), Bahnübergangshinderniserkennung (Level Crossing Obstacle Detection - LOD), Bahnübergang (level crossing - LC)
Definition
Ein anhaltendes Problem im Landverkehr sind Kollisionen an Bahnübergängen (RLX). RLX sind höhengetrennte Kreuzungen, an denen Schienenfahrzeuge (und ihre Infrastruktur) die Infrastruktur eines anderen Verkehrsträgers (in der Regel Straßen) kreuzen. In den meisten Fällen hat der Zug Vorrang und der übrige Verkehr wird angehalten, bis der Zug vorbeigefahren ist. Technisch gesehen ist diese Entflechtung ein einfaches Problem (Salmon et al., 2016). Dennoch kommt es jedes Jahr zu einer Reihe von Unfällen. Kollisionen an Bahnübergängen stellen weltweit ein Sicherheitsrisiko dar (European Railway Agency, 2020). Unfälle verursachen menschliche, soziale und wirtschaftliche Kosten. Darüber hinaus wirken sich Beinahe-Kollisionen negativ auf die psychische Gesundheit und das Wohlbefinden der beteiligten Personen – Autofahrer:innen, Zugführer:innen und Umstehende - aus (Read et al., 2021). Die beste Möglichkeit, diese Art von Unfällen zu minimieren, wäre die Beseitigung der Bahnübergänge und/oder deren Ersatz durch Tunnel oder Brücken. Da diese Optionen sehr kostspielig sind, wird für die meisten Bahnübergänge die billigere Alternative von Schildern, Blinklichtern und Schranken verwendet, in der Erwartung, dass sich die Fahrer:innen von Straßenfahrzeugen an die Regeln halten werden. Daten aus Australien zeigen jedoch, dass der größte Teil der Kollisionen an Kreuzungen mit Schranken stattfindet, während der größte Teil der tödlichen Unfälle an Kreuzungen mit Blinklicht und Stoppschildern passiert (ITSR, 2011). Radalj et al. (2011) haben in einer umfangreichen Feldstudie in sieben ländlichen Gemeinden nachgewiesen, dass 90 % der Verkehrsteilnehmer:innen die Geschwindigkeitsbegrenzungen an den Signalen missachteten und dass 90 % der Unfälle an Bahnübergängen auf Fehler der Fahrzeugführer:innen, Müdigkeit, Geschwindigkeit oder Risikobereitschaft aufgrund der geringen Zugfrequenz zurückzuführen waren. Auch in Österreich gibt es bereits Daten, die zeigen, dass praktisch alle Unfälle an Bahnübergängen von Verkehrsteilnehmer:innenn verursacht werden, die rote Ampeln, Stoppschilder, Schranken und grundlegende Verkehrsregeln nicht beachten. Sehr oft sind Menschen, die in der Nähe eines Bahnübergangs wohnen oder ihn regelmäßig überqueren, in diese Unfälle verwickelt, weil sie mit der Zeit unvorsichtiger und übermütiger werden (bmvit, 2011). Gemäß der Europäischen Union (2014) werden Bahnübergänge in aktive und passive unterteilt:
- Ein passiver Bahnübergang ist ein Bahnübergang ohne jede Form von Warnsystem oder Schutz, der aktiviert wird, wenn es für Benutzer:innen unsicher ist, ihn zu überqueren.
- Ein aktiver Bahnübergang ist ein Bahnübergang, bei dem die Benutzer:innen des Bahnübergangs vor einem herannahenden Zug geschützt oder gewarnt werden. Der Schutz wird durch Halb- oder Vollschranken gewährleistet. Die Warnung erfolgt durch sichtbare (z. B. Lichter) und akustische Vorrichtungen (z. B. Glocken, Hupen, Schallsignale).
Aktive Bahnübergänge werden klassifiziert als: - Manuell: ein Bahnübergang, bei dem die benutzerseitige Sicherung oder Warnung manuell von Bahnmitarbeiter:innen aktiviert wird. - Automatisch mit benutzerseitiger Warnung: : Ein Bahnübergang, bei dem die benutzerseitige Warnung durch den herannahenden Zug aktiviert wird. - Automatisch mit benutzerseitigem Schutz: Ein Bahnübergang, bei dem der benutzerseitige Schutz durch den herannahenden Zug aktiviert wird. Dazu gehört auch ein Bahnübergang, der sowohl über einen benutzerseitigen Schutz als auch über eine Warnung verfügt. - Gleisseitiger Schutz: Ein Bahnübergang, bei dem ein Signal oder ein anderes Zugsicherungssystem die Weiterfahrt eines Zuges nur dann zulässt, wenn der Bahnübergang frei von Hindernissen ist.
Die streckenseitige Sicherung ermöglicht die Erkennung von Hindernissen an Bahnübergängen durch eine oder mehrere Erfassungseinheiten, je nach Größe des Bahnübergangs. Eine streckenseitige Steuereinheit sammelt die von den Erfassungseinheiten empfangenen Informationen und erzeugt Alarme auf der Grundlage hoher Schwellenwerte (z. B. Mindestabmessungen des Hindernisses). Die Steuereinheit ist in der Lage, die Bahnübergangshinderniserkennung (BÜH) in die konventionelle Bahnübergangssicherung mit kompletten Schranken und Antrieben zu integrieren und über gesicherte Schnittstellen mit dem Stellwerk zu kommunizieren. Die Systeme zeichnen sich durch hohe Zuverlässigkeit und hohe Genauigkeit aus, auch bei rauen Wetterbedingungen wie Regen, Schnee und Nebel. Derzeit laufen mehrere Versuche mit europäischen Bahnen (mermecgroup, n.d.).
Laut Darlington (2017) muss ein ideales Hinderniserkennungssystem:
- eine Sicherheitsintegrität bieten, die nicht schlechter und idealerweise besser ist als bei einem manuell betriebenen Bahnübergang
- keine oder nur minimale Verspätungen von Zügen aufgrund von Geräteausfällen oder Fehldetektionen verursachen
- in Bezug auf die Lebenszykluskosten erschwinglich sein
- bei allen Wetterbedingungen und Temperaturen funktionieren
- praktisch zu bedienen und zu warten sein
Darüber hinaus müssen getrennte technische Systeme bestätigen, dass der Bahnübergang durch Schranken oder Tore geschlossen ist, und erst wenn das Detektionssystem bestätigt hat, dass der Bahnübergang frei ist, wird der Zug durchgelassen. Dies könnte durch die Freigabe der Schutzsignale oder, auf einigen Schienennetzen, durch eine direkte Kommunikationsverbindung zum Zug erreicht werden. Einige Systeme bieten zwar gute Sicherheitsvorteile, aber nur auf Kosten erheblicher betrieblicher Verzögerungen. Das Hinderniserkennungssystem muss sich in die bestehende Eisenbahninfrastruktur einfügen und soll den Betrieb nicht beeinträchtigen. Für die Hinderniserkennung stehen folgende Technologien zur Verfügung, die jedoch alle Vor- und Nachteile haben (Darlington, 2017):
Videobildtechnik
Der Nachteil der Videotechnik besteht darin, dass das System bei Nacht oder Nebel nur schwer etwas erkennen kann. Der Bahnübergang benötigt daher möglicherweise die gleiche oder eine höhere Beleuchtungsstärke als ein manueller Bahnübergang, obwohl dies bei Nebel wenig hilfreich wäre. Außerdem lassen sich die Masse oder die Materialeigenschaften eines Objekts nicht so leicht unterscheiden. So könnte beispielsweise ein Karton oder eine Zeitung fälschlicherweise für ein kleines Kind gehalten werden.
Wärmebildtechnik
Wärmebildkameras können einige dieser Einschränkungen überwinden, da sie auf der Grundlage feiner Temperaturunterschiede ein scharfes Bild erzeugen und nicht durch Umgebungsbedingungen wie völlige Dunkelheit, Rauch oder Nebel beeinträchtigt werden. Sie benötigen kein Licht und können nicht durch direktes Sonnenlicht geblendet werden. Allerdings könnten Objekte ohne Wärmequelle an einer Kreuzung zurückgelassen werden (z. B. ein ungebremster Anhänger) und somit nicht erkannt werden. Die Wärmebildtechnik kann in Kombination mit anderen Erkennungstechnologien eine Lösung bieten.
Strahlunterbrechung im Millimeterwellenbereich
Die Strahlunterbrechung ist eine auf Mikrowellen basierende Technik zur Hinderniserkennung. Wenn ein Objekt in den Strahlengang eindringt, wird das Signal zum Sende-Empfangsgerät abgeschwächt, was die Anwesenheit des Objekts anzeigt. Eines der weltweit ersten Systeme der Sicherheitsintegritätsstufe (SIL) 4 wurde in Italien installiert. Obwohl das System sicher war, reagierte es sehr empfindlich auf Temperaturschwankungen, Regen und Kondenswasser auf den Sensoren von Sender und Empfänger. Es musste regelmäßig kalibriert und gewartet werden. Außerdem bedeuteten die geringe Strahlbreite und das begrenzte Sichtfeld, dass für hohe Objekte noch mehr Sensoren benötigt wurden.
LiDAR
LiDAR erfasst den Kreuzungsbereich mit Impulsen aus Nahinfrarotlicht, die von der Oberfläche eines Objekts auf dem Bahnübergang reflektiert werden. Die reflektierten Impulse können dann analysiert werden, um seine Position, Richtung und Geschwindigkeit zu bestimmen. Da Licht eine kürzere Wellenlänge als Radiowellen hat, bietet LiDAR das Potenzial für eine höhere Genauigkeit als Radar. Network Rail hat LiDAR bei seiner ersten Generation von OD-Kreuzungen als Ergänzung zum Radar eingesetzt, um die Erkennung von Objekten in niedriger Höhe zu verbessern. Die verbesserte Empfindlichkeit bedeutet jedoch auch, dass das System anfällig für kleine Objekte ist, wie z. B. Wasserdampftröpfchen, aus denen sich Nebel zusammensetzt, obwohl dies durch Softwarealgorithmen abgemildert werden kann. Außerdem wird für den Betrieb Licht benötigt, und die Geräte müssen in einem transparenten Gehäuse untergebracht werden, was zu einer erhöhten Anfälligkeit für Wasser, Schmutz und Staub auf dem Glas führt.
Induktionsschleifen
Eine Induktionsschleife wird zur Erkennung von Metallobjekten verwendet und eignet sich daher nicht für die Erkennung von Fußgänger:innen. Leider gibt es immer mehr Straßenfahrzeuge aus Verbundwerkstoffen und Aluminium, die einen geringeren induzierten Strom liefern als Stahl, und es wurde über Probleme bei der Erkennung von Lastwagen mit hohen Achsen/Bodenfreiheit berichtet. Eine weitere Schwierigkeit ist die Installation und Wartung von Induktionsschleifen in der Oberfläche der Kreuzung oder Straße.
Dehnungsmessstreifen
Mit einem Dehnungsmessstreifen oder Piezometer kann die Verformung (Dehnung) eines Materials gemessen werden (die Verformung der Oberfläche des Bahnübergangs, wenn ein Objekt den Bahnübergang überquert). Ein Dehnungsmessstreifen sollte sowohl für Fahrzeuge als auch für Fußgänger:innen kalibriert werden können, ist aber möglicherweise nicht in der Lage, kleine Kinder zu erkennen. Piezometer und Dehnungsmessstreifen sind potenziell zuverlässiger als Induktionsschleifen, aber durch die Platzierung der Detektoren in der Fahrbahn des Bahnübergangs sind sie genauso schwierig zu warten.
Ultraschall-Sensoren
Diese senden Ultraschallimpulse aus, die vom menschlichen Ohr nicht wahrgenommen werden können. Wenn der Impuls ein Objekt erreicht, wird der Schall von der Oberfläche reflektiert. Es wären mehrere Sensoren erforderlich, um schwarze Flecken zu vermeiden, und auf elektrifizierten Strecken würden sich die Geräte in unmittelbarer Nähe von Teilen der Freileitungen befinden. Die Geräte wären anfälliger für Vandalismus und Beschädigungen durch die Öffentlichkeit, da sie an einem Bahnübergang viel auffälliger sind als andere Formen der Detektion. Es wird jedoch berichtet, dass in den USA erfolgreiche Versuche zur Hinderniserkennung mit einer Reihe von Ultraschallsensoren durchgeführt wurden, die über einem Bahnübergang aufgehängt waren.
Radar
Es nutzt Radiowellen, um Objekte zu erkennen. Entfernung, Position und Geschwindigkeit eines Objekts können bestimmt werden. An den Grenzen des Bahnübergangs können Reflektoren installiert werden, die ein Referenz-Echosignal liefern und dieses zur Überwachung des Zustands des Bereichs und des Sensors selbst nutzen. Radargestützte Systeme sind in der Lage, Objekte auch bei Regen, Nebel, Schnee und Hagel zuverlässig zu erkennen. Es wurden OD-Radarsysteme mit SIL 4-Integrität und Systeme mit breiter Strahlbreite entwickelt, so dass für hohe und niedrige Hindernisse nicht mehrere Sensoren erforderlich sind. Ein Vorteil des Radars gegenüber anderen Erkennungsmethoden ist, dass einige materielle Objekte mit geringer Dichte, wie z. B. eine leere Pappschachtel, ignoriert werden. Da es sich um ein funkbasiertes System handelt, ist für ein Radar-OD-System normalerweise eine Funklizenz erforderlich, was jedoch bedeutet, dass der Betreiber der Eisenbahninfrastruktur die Frequenz exklusiv nutzen kann und in der Lage ist, etwaige Störungen zu bewältigen. Der Sensor ist in der Lage, unter allen Wetterbedingungen zu arbeiten, und hat eine prognostizierte mittlere Betriebsdauer zwischen Ausfällen (MTBF) von mehr als 10 Jahren.
Ein OD-System kann einen oder mehrere der verschiedenen Detektionstypen verwenden, z. B. verwenden die OD-Kreuzungen der ersten Generation von Network Rail sowohl Radar als auch Laser Image Detection and Ranging (LiDAR).
Wichtige Interessensgruppen
- Betroffene: Autofahrer:innen, Radfahrer:innen, Fußgänger:innen, Zugreisende, Zugbetreiber:innen, Triebfahrzeugführer:innen
- Verantwortlich: Nationale Regierungen, Stadtverwaltungen, Verkehrsbehörden, Eisenbahnunternehmen, Hersteller von Eisenbahnausrüstung und -infrastruktur
Aktueller Stand der Wissenschaft und Forschung
Eine Fahrsimulationsstudie (Larue et al., 2015) zeigte, dass sich das Fahrerverhalten bei passiven Kreuzungen durch assistive IVS-Eingriffe änderte, während bei aktiven Kreuzungen selbst bei eingeschränkter Sicht keine Unterschiede festgestellt wurden. Die akustische Intervention führte zu einer höheren Einhaltung im Vergleich zur visuellen Intervention. Die Ergebnisse der straßengestützten IVS-Technologie deuten darauf hin, dass es unwahrscheinlich ist, dass dies zu positiven Sicherheitsergebnissen an passiven Bahnübergängen führt, wenn die Fahrer:innen weiterhin unter allen Bedingungen am Bahnübergang anhalten müssen (aufgrund des Stoppschilds am Bahnübergang). Eine akustische Intervention im Fahrzeug dürfte sich positiv auf die Sicherheit auswirken, da der Mensch in der Lage ist, Geräusche unabhängig von der Richtung zu hören, aus der das Geräusch kommt. Dies macht den Ton zu einem besonders nützlichen Medium für die Übermittlung von sicherheitskritischen Meldungen.
Viele Autor:innen untersuchen das Fahrerverhalten an Bahnübergängen (Beanland et al., 2017; Hao et al., 2015; Larue et al., 2015; Tey et al., 2013). Eine systematische Studie von Read et al. (2021) kategorisiert die Faktoren, die das Risiko an Bahnübergängen beeinflussen, nach 3 Aspekten:
Unfallhäufigkeit und -schwere
unsicheres und nicht konformes Verhalten der Verkehrsteilnehmer:innen
Risikowahrnehmung, Einstellungen und Überzeugungen der Verkehrsteilnehmer:innen Die meisten Studien konzentrierten sich auf das unsichere und/oder nicht vorschriftsmäßige Verhalten der Verkehrsteilnehmer:innen.
Die Ergebnisse von Beanland et al. (2017) deuten darauf hin, dass eine deutliche Verlangsamung an passiven RLX notwendig ist, um den Fahrer:innen Zeit zu geben, sich visuell nach Zügen zu erkundigen, dass aber Stoppschilder nicht notwendig sind, da Fahrer:innen, die rollend anhielten, und solche, die vollständig anhielten, gleich viel Zeit damit verbrachten, sich visuell nach Zügen zu erkundigen und ein ähnliches Situationsbewusstsein zeigten. In ähnlicher Weise ist eine Vollbremsung für einige Fahrzeuge problematisch (z. B. für schwere Fahrzeuge, die an Schwung verlieren und mehr Zeit und Energie benötigen, um ihre Geschwindigkeit wieder zu erreichen). Vor Jahren haben einige Forscher:innen auch gegen die Verwendung von Stoppschildern an RLXs argumentiert, da sie befürchteten, dass die hohen Raten der beobachteten Nichteinhaltung dieses Verhalten verallgemeinern und zu einer Nichteinhaltung an stoppkontrollierten Autobahn- und Straßenkreuzungen führen würde (Austin & Carson, 2002; Raub, 2009). Zhang et al. (2019) untersuchten erhöhte Bahnübergänge (RC) als Alternative zur derzeitigen Form von Bahnübergängen, um die Schwere von Unfällen an Straßen-Schienen-Kreuzungen zu mindern. Darüber hinaus haben Larue et al. (2015) 3 IVS-Anwendungen für Bahnübergänge kategorisiert:Fahrzeuginternes visuelles System: Ein Warnsystem mit GPS (als Smartphone-Anwendung). Ein solches System sollte insbesondere das Bewusstsein der Fahrer:innen für den Zustand des Bahnübergangs verbessern, wenn er sich einem Bahnübergang mit eingeschränkter Sicht nähert (Kurven, Steigungen, Nebel oder grelles Sonnenlicht).
Fahrzeuginterne Audiowarnung (Funkstörung): Wenn sich ein Zug dem Bahnübergang näherte, ertönte aus den Lautsprechern eine verbale Warnung, während bei aktiven Bahnübergängen die Blinklichter aktiviert wurden. Bei passiven Bahnübergängen wurde die Warnung 20 Sekunden vor der Ankunft des Zuges ausgegeben.
Straßenseitige blinkende IVS-Baken: Bei diesem straßenbasierten IVS wurden blinkende Warnbaken auf der Straße verwendet. Sie wurden aktiviert, wenn sich ein Zug dem Bahnübergang näherte. Diese Baken markierten die Stelle, an der Fahrer:innen das Fahrzeug anhalten sollten, ähnlich wie bei beleuchteten Start- und Landebahnen von Flugzeugen. Dieses System sollte die Sichtbarkeit des Status des Bahnübergangs zu jeder Tageszeit erhöhen und dazu führen, dass die Fahrer:innen den Status des Bahnübergangs früher bemerken, auch wenn die Sicht eingeschränkt ist (es konnten keine weiteren Informationen darüber gefunden werden, welche Systeme sich noch in der Entwicklung befinden und welchen Status sie haben).br/>
Fayyaz & Johnson (2020) schlagen vor, Deep-Learning-Technologie in Radar- und Videoüberwachungssystemen einzusetzen, um Objekte besser zu klassifizieren oder ihre genaue Position im gegebenen Bild zu lokalisieren, da die Umgebung von Bahnübergängen dynamisch ist (wachsende Vegetation und häufig harmlose Objekte). Die Technologie soll sich also nicht auf die rohen Pixelwerte stützen, sondern auf die Merkmale und die tatsächliche Darstellung des Objekts.
Aktueller Stand der praktischen Umsetzung
Nach Angaben der Europäischen Eisenbahnagentur (2020) hat sich die Sicherheit an Bahnübergängen in den letzten zehn Jahren verbessert. Mit 1.721 signifikanten Unfällen wurde 2018 die niedrigste Zahl seit 2010 verzeichnet. Der Rückgang ist hauptsächlich auf “externe” Unfälle zurückzuführen, an denen Dritte beteiligt waren (Unbefugte und Bahnübergangsbenutzer). Zwischen 2006 und 2018 ist die Zahl der tödlichen Unfälle im Eisenbahnverkehr um 60 % zurückgegangen (durchschnittlich 4,6 % pro Jahr). Unfälle an Bahnübergängen und tödliche Unfälle machen mehr als ein Viertel aller Eisenbahnunfälle auf EU-Eisenbahnen aus. Jedes Jahr sterben fast 300 Menschen bei Unfällen auf Bahnübergängen (EU-28), wobei ein geschätzter wirtschaftlicher Schaden von 1 Milliarde Euro entsteht.
In den EU-28-Ländern gibt es etwa 105 000 Bahnübergänge. Passive Bahnübergänge machen 49 % aller Bahnübergänge aus. Diese Bahnübergänge sind in der Regel mit einem Andreaskreuz ausgestattet, bieten den Verkehrsteilnehmer:innen aber keine aktive Warnung. Bahnübergänge mit Benutzerschutz (Armschranken und Blinklichter) sind die häufigste Art von aktiven Bahnübergängen (45 %). Bahnübergänge, die einen vollständigen Straßenschutz mit einem Schienenschutz kombinieren, machen 16 % (17 277) aller Bahnübergänge aus. Passive Bahnübergänge und Bahnübergänge im Allgemeinen verschwinden nur langsam. Wenn der derzeitige Trend anhält, wird es bis zum Ende des Jahrhunderts noch etwa 35 000 Bahnübergänge im EU-Schienennetz geben, von denen 5 000 passiv sein werden. Der letzte Bericht, in dem die Erreichung der Sicherheitsziele bewertet wurde, zeigte, dass die Sicherheitsleistung in allen Mitgliedstaaten in den Kategorien Fahrgäste, Benutzer:innen von Bahnübergängen und gesellschaftliche Risiken akzeptabel ist. In der Kategorie der Nutzer:innen von Bahnübergängen wurde zum ersten Mal seit der Bewertung von 2013 in keinem Land eine mögliche Verschlechterung festgestellt (Europäische Eisenbahnagentur, 2019). Network Rail (2019) hat folgende Prioritäten für Informationssysteme an Bahnübergängen festgelegt:
- Ungesicherte automatische Bahnübergänge - der automatische Halbschrankenübergang.
- Automatische Bahnübergänge, die den Triebfahrzeugführer:innen informieren, ob der Bahnübergang frei ist, bevor ein Zug den Übergang passieren kann.
- Verbesserung und Installation von visuellen und akustischen Warnsignalen
Um die Sicherheit an Bahnübergängen weiter zu verbessern, werden Hinderniserkennungssysteme an Bahnübergängen eingesetzt. Die Systeme werden in einen Sicherheits-Integritätslevel (SIL) eingeteilt, der eine vierstufige Skala aufweist, wobei SIL 1 die geringste Sicherheitsanforderung darstellt und SIL 4 die strengste ist. Diese Stufen werden verwendet, um die Anforderungen an die Sicherheitsintegrität für die von Sicherheitssystemen ausgeführten Sicherheitsfunktionen zu spezifizieren (Gabriel et al., 2018).
Herkömmliche (intrusive) Sensoren, die auf oder in den Gleisen installiert werden (z. B. Induktionsschleifen und Dehnungsmessstreifen), stören die Gleise während ihrer Installation und Wartung, was das System kostspielig und für seine Anwendbarkeit an Bahnübergängen ungeeignet macht. Nicht-intrusive Sensoren (z. B. Radar und CCTV) werden außerhalb der Gleise installiert und stören die Gleise während der Installations- und Wartungszeiten nicht. Die niedrigen Kosten und die lange Lebensdauer dieser Sensoren machen Radar und CCTV zur bevorzugten Wahl für Anwendungen an Bahnübergängen (Fayyaz & Johnson, 2020).
Das Unternehmen L.B. Foster in den USA hat bereits mehrere LODs für die Überwachung von Rotlichtverstößen, Kennzeichenerkennung, Videoanalyse und Datenaufzeichnung im Einsatz. Das Kamerasystem für Rotlichtverstöße hat zu Tausenden von Strafverfolgungen wegen gefährlichen Fahrens geführt. Die Anforderung, ein 9-jähriges Kind zu erkennen, während es auf dem Bahnübergang liegt, erwies sich als Herausforderung. Dies bedeutete, dass jedes Objekt mit einer Größe von 115 mm Höhe erkannt werden musste. Die zur Erfüllung dieser Anforderung gewählte Technologie war ein LIDAR-Detektor, der nach dreimonatigen Tests am Boden bewies, dass es nach Modifikationen möglich war, ein Objekt dieser Größe zu erkennen. Die Integration des Systems in typische Signalisierungsschaltungen erwies sich ebenfalls als Herausforderung, da viele Relaisschaltungen zu berücksichtigen waren, nicht nur für die Hinderniserkennung, sondern für alle Fehlermodi usw. (Roberts, 2018).
Relevante Initiativen in Österreich
Im Jahr 2016 wurden 40 Bahnübergänge in Österreich mit Kameras ausgestattet, um Rotlichtsünder zu filmen und Bußgeldbescheide auszustellen.
Auswirkungen in Bezug auf die Ziele für nachhaltige Entwicklung (SDGs)
| Ebene der Auswirkungen | Indikator | Richtung der Auswirkungen | Beschreibung des Ziels & SDG | Quelle |
|---|---|---|---|---|
| Systemisch | Weniger Unfaelle, bessere Informationssysteme fuer Bahnuebergaenge senken menschliche, soziale und wirtschaftliche Kosten | + | Gesundheit und Wohlbefinden (3) | Read et al., 2021 |
Technologie- und gesellschaftlicher Bereitschaftsgrad
| Stand der Technologiebereitschaft | Gesellschaftlicher Bereitschaftsgrad |
|---|---|
| 7-9 | 7-9 |
Offene Fragen
- Lohnt es sich auf der Grundlage der Kosten-Nutzen-Analyse, in sicherere Bahnübergänge zu investieren?
- Wie hoch wären die zusätzlichen Kosten für die verschiedenen LODs?
- An wie vielen Bahnübergängen sind bereits Bahnübergangsinformationssysteme im Einsatz?
Referenzen
- Austin, R. D., & Carson, J. L. (2002). An alternative accident prediction model for highway-rail interfaces. Accident Analysis and Prevention, 34(1), 31–42. https://doi.org/10.1016/S0001-4575(00)00100-7
- Beanland, V., Salmon, P. M., Filtness, A. J., Lenné, M. G., & Stanton, N. A. (2017). To stop or not to stop: Contrasting compliant and non-compliant driver behaviour at rural rail level crossings. Accident Analysis and Prevention, 108, 209–219. https://doi.org/10.1016/j.aap.2017.09.004
- bmvit. (2011). Sicher Handeln an Eisenbahnkreuzungen. https://www.bmk.gv.at/themen/verkehr/eisenbahn/sicherheit/bahnuebergaenge/sicherhandeln.html
- Darlington, P. (2017, May 30). Obstacle detection for level crossings. Rail News. https://www.railengineer.co.uk/obstacle-detection-for-level-crossings/
- European Railway Agency. (2019). Assessment of achievement of safety targets - 2019.
- European Railway Agency. (2020). Report on Railway Safety and Interoperability in the EU. European Union Agency for Railways. https://doi.org/10.2821/30980
- European Union. (2014). Level crossings - European Union common safety indicators ( ref . Directive 2014 / 88 / EU ).
- Fayyaz, M. A. B., & Johnson, C. (2020). Object detection at level crossing using deep learning. Micromachines, 11(12), 1–16. https://doi.org/10.3390/mi11121055
- Gabriel, A., Ozansoy, C., & Shi, J. (2018). Developments in SIL determination and calculation. In Reliability Engineering and System Safety (Vol. 177, pp. 148–161). Elsevier Ltd. https://doi.org/10.1016/j.ress.2018.04.028
- Hao, W., Kamga, C., & Daniel, J. (2015). The effect of age and gender on motor vehicle driver injury severity at highway-rail grade crossings in the United States. Journal of Safety Research, 55, 105–113. https://doi.org/10.1016/j.jsr.2015.08.006
- ITSR. (2011). Transport safety bulletins: Level crossing accidents in Australia (Issue August).
- Larue, G. S., Kim, I., Rakotonirainy, A., Haworth, N. L., & Ferreira, L. (2015). Driver’s behavioural changes with new intelligent transport system interventions at railway level crossings - A driving simulator study. Accident Analysis and Prevention, 81, 74–85. https://doi.org/10.1016/j.aap.2015.04.026
- mermecgroup. (n.d.). Level Crossing Obstacle Detection System. Available at: https://www.mermecgroup.com/protect/level-crossing/1033/level-crossing-obstacle-detection.php [Accessed: 31 May 2021]
- Network Rail. (2019). Enhancing level crossing safety 2019-2029. 1–35.
- Radalj, T., Kidd, B., & Sultana, S. (2011). Reduction of Speed Limit at Approaches to Railway Level Crossings in Western Australia. ACRS, September, 1–10. https://acrs.org.au/article/reduction-of-speed-limit-at-approaches-to-railway-level-crossings-in-wa/
- Raub, R. A. (2009). Examination of Highway–Rail Grade Crossing Collisions Nationally from 1998 to 2007. Transportation Research Record, 2122(1), 63–71. https://doi.org/10.3141/2122-08
- Read, G. J. M., Cox, J. A., Hulme, A., Naweed, A., & Salmon, P. M. (2021). What factors influence risk at rail level crossings? A systematic review and synthesis of findings using systems thinking. Safety Science, 138, 105207. https://doi.org/10.1016/j.ssci.2021.105207
- Roberts, N. (2018, July). Network Rail - Level crossing obstacle detection systems - L.B. Foster. https://lbfoster.eu/en/case-studies/control-and-display/network-rail-level-crossing-obstacle-detection-systems/
- Salmon, P. M., Lenné, M. G., Read, G. J. M., Mulvihill, C. M., Cornelissen, M., Walker, G. H., Young, K. L., Stevens, N., & Stanton, N. A. (2016). More than meets the eye: Using cognitive work analysis to identify design requirements for future rail level crossing systems. Applied Ergonomics, 53, 312–322. https://doi.org/10.1016/j.apergo.2015.06.021
- Tey, L. S., Wallis, G., Cloete, S., & Ferreira, L. (2013). Modelling driver behaviour towards innovative warning devices at railway level crossings. Accident Analysis and Prevention, 51, 104–111. https://doi.org/10.1016/j.aap.2012.11.002
- Zhang, Z., Dhanasekar, M., Ling, L., & Thambiratnam, D. P. (2019). Effectiveness of a raised road: rail crossing for the safety of road vehicle occupants. Engineering Failure Analysis, 97, 258–273. https://doi.org/10.1016/j.engfailanal.2019.01.046
2.4 Elektrisches Straßensystem (Electric road system - ERS)
Synonyme
ERS
Definition
Das elektrische Straßensystem (ERS) ist eine technologische Lösung, die darauf abzielt, Energie von der Straße auf die auf dieser Straße fahrenden Fahrzeuge zu übertragen. Es kann als Alternative für den nachhaltigen Verkehr betrachtet werden, wenn es die Nutzung von Hybrid- und Elektrofahrzeugen unterstützt. Es gibt drei Haupttypen von ERS (Muelaner, 2020):
Oberleitungssysteme sind Freileitungen, die etwa 5 Meter über der Straße aufgehängt sind und in der Regel für Stadtbahnen und Elektrofahrzeuge, manchmal aber auch entlang von Autobahnen für den Antrieb schwerer Nutzfahrzeuge verwendet werden. Oberleitungen sind die billigste und ausgereifteste Form von ERS, da sie den für Eisenbahnen oder Stadtbahnen verwendeten Stromsystemen ähneln. Sie setzen voraus, dass das Fahrzeug mit einem Stromabnehmer ausgestattet ist, der es mit der Leitung verbindet und die seitlichen und vertikalen Bewegungen aufnimmt. Aus diesem Grund sind Oberleitungssysteme am besten für große Nutzfahrzeuge geeignet, und die fehlende Kompatibilität mit kleinen Privatfahrzeugen wird als großer Nachteil angesehen. Darüber hinaus stellen die Oberleitungen bei Unfällen eine große Gefahr für alle Verkehrsteilnehmer:innen dar. Außerdem beeinträchtigen sie das Erscheinungsbild der Gebiete, in denen sie verlegt sind, was zu Problemen bei der Akzeptanz in der Bevölkerung führen kann (Muelaner, 2020).
Leitfähige Gleise sind Metallschienen, die auf (oder in) die Straßenoberfläche eingelassen sind und durch einen Kontakt mit einem Aufnehmer unter dem Fahrzeug Strom liefern. Aus Sicherheitsgründen sind die Schienen nicht durchgehend, sondern in kleine Segmente unterteilt, so dass die elektrische Verbindung nur dann besteht, wenn das Fahrzeug darüber fährt. Im Gegensatz zu Oberleitungen können die Stromschienen für Fahrzeuge unterschiedlicher Größe verwendet werden. Ihr Vorteil liegt auch in den geringeren Installationskosten. Schweden war ein Testland für den Einsatz dieses elektrischen Straßensystems in größerem Maßstab (Muelaner, 2020).
Inductive tracks sind leitfähige Spulen, die unter der Straßenoberfläche verlegt werden und Energie liefern, indem sie einen elektrischen Strom in der Spule unter dem auf der Spur fahrenden Fahrzeug induzieren. Ihr Vorteil ist der geringere Wartungsaufwand im Vergleich zu leitfähigen Gleisen, allerdings würde ein Systemausfall kostspielige Arbeiten für den Zugang zur unterirdischen Infrastruktur erfordern.
Insgesamt würde der breitere Einsatz von ERS den Bedarf an kostspieligen Ladestationen verringern, die Wartezeit während des Aufladens des Fahrzeugs beseitigen, die Reichweite von Hybrid- und Elektrofahrzeugen deutlich erhöhen und eine Verkleinerung der in den Pkw installierten Batterien erleichtern, was sich unmittelbar in einer effizienteren Leistung niederschlägt.
Wichtige Interessensgruppen
- Betroffene: Private und gewerbliche Fahrer:innen, private Transportunternehmen, allgemeine Öffentlichkeit
- Verantwortliche: Kommunen, Landesregierungen, Bauunternehmen, Energie- und Mineralölunternehmen, Unternehmen der Straßenverkehrstechnik, Automobilhersteller
Aktueller Stand der Wissenschaft und Forschung
Derzeit konzentriert sich die Forschung auf die Erprobung von ERS-Lösungen, um einen Einsatz in größerem Maßstab zu ermöglichen, die Anwendbarkeit auf eine neue Art von Fahrzeugen auszuweiten, ihre Effizienz zu steigern und ihr Potenzial zur Dekarbonisierung des Verkehrs zu bewerten.
Seit 2008 arbeitet das südkoreanische Unternehmen OLEV (Zweigstelle der Universität KAIST) an der induktiven Energieübertragung und seit 2013 sind zwei Elektrobusse auf öffentlichen Straßen innerhalb des Universitätsgeländes in Betrieb (Kelion, 2013). Allerdings ist dieses System derzeit veraltet und führt zu einer geringen Geschwindigkeit im öffentlichen Personennahverkehr. Im Jahr 2016 wurde in Deutschland ein erster Test der Oberleitungen auf der 2 km langen Teststrecke von Siemens in Berlin durchgeführt, gleichzeitig wurde in Schweden eine vollständige Integration mit Scania-Fahrzeugen erreicht. Ein weiteres Beispiel ist die Zusammenarbeit von Volvo und Alstom bei der Erprobung von Oberleitungen auf der 400 m langen Teststrecke in Hällered, Schweden (Möller, 2017). In ähnlicher Weise hat die schwedische Verkehrsbehörde in Zusammenarbeit mit Elonroad im Rahmen des Projekts [EVolution Road](https://www.evolutionroad.se/eneine 1 km lange Demonstrationsstraße in Lund gebaut, um die Leistung eines Elektrobusses zu testen.
Eine in Frankreich und Italien durchgeführte Studie über die Effizienz von Induktionsspuren hat gezeigt, dass ihre Leistung von der Präzision der Ausrichtung zwischen der Spur und der Spule im Fahrzeug abhängt (Muelaner, 2020). Eine Studie von Börjesson et al. (2020) hat gezeigt, dass der Einsatz elektrischer Lösungen für den Straßenverkehr die Betriebskosten der Güterverkehrsunternehmen durch die Umstellung von Diesel auf Strom senken kann. Folglich überwiegt der soziale Nutzen dieser technischen Lösung ihre Kosten. Darüber hinaus wurde festgestellt, dass der Einsatz von ERS eine erhebliche Verringerung der Kohlenstoffemissionen ermöglicht.
Aktueller Stand der praktischen Umsetzung
Gegenwärtig gibt es mehrere Unternehmen, die Energietechnologien anbieten, wie z. B. Elways, Alstom oder Elonroad, um nur einige zu nennen. Die Verbreitung solcher Unternehmen ermöglichte die aktive Erprobung und Umsetzung verschiedener ERS-Lösungen auf der ganzen Welt.
Seit 2016 wurden Freileitungen erfolgreich auf öffentlichen Straßen in Schweden (E16 bei Gävle) und in den USA (City of Carson) eingesetzt. In Deutschland finden derzeit drei vom Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit (BMU) geförderte Tests statt. In Hessen und Schleswig-Holstein wurden Anfang 2020 5 km Autobahn elektrifiziert (Wettengel, 2019), in Baden-Württemberg wurden 2021 4 km einer Bundesstraße mit einem Oberleitungssystem in Betrieb genommen. Im Moment versorgen diese Oberleitungen Güterfahrzeuge mit Strom, aber es gibt ein Problem bei den LKW-Flotten, die aus Osteuropa durch Deutschland fahren, weil es ihnen an modernen Hybrid-LKW mit Stromabnehmern auf dem Dach fehlt.
Zwischen 2016 und 2017 wurden im Rahmen des vom spanischen Energieunternehmen Endesa geleiteten Projekts VICTORIA VICTORIA die ersten dynamischen induktiven Lastsysteme für eine Buslinie in Malaga, Spanien, entwickelt. In ähnlicher Weise wurde das EU-Projekt FABRIC in Turin, Italien, und Satory in Frankreich durchgeführt (Tongur & Sundelin, 2016).
Was die Kostenanalyse betrifft, so zeigt ein Beispiel aus dem Vereinigten Königreich, dass induktive Spuren einen Kostenvorteil bieten: Die Installation von 1 Meile (1,6 km) induktiver Spuren auf einer zweispurigen Straße kostet rund 1,4 Millionen Euro. Würden diese auf allen britischen Autobahnen installiert, würden sich die Kosten auf rund 13 Milliarden Euro belaufen. Gleichzeitig belaufen sich die Kosten für die zusätzlichen Stromkapazitäten, die für Wasserstoff in FCEV benötigt werden, auf 140 Milliarden Euro. Eine Kosten-Nutzen-Analyse hat jedoch gezeigt, dass die Einsparungen, die sich aus kleineren Batterien in Elektroautos ergeben, die Kosten für den Bau von ERS aufwiegen würden, wenn die meisten Fahrzeuge ERS nutzen würden.
Interessanterweise ist ERS in Österreich nicht besonders populär, was möglicherweise auf das gut ausgebaute Eisenbahnnetz zurückzuführen ist, das bisher den Güterverkehr dominierte. Insbesondere Kritiker:innen bezeichnen den Bau von Elektroautobahnen als Geldverschwendung, da sie nur Unternehmen unterstützen, die ihre Flotten mit den notwendigen Fahrzeugen mit Oberleitung ausstatten (Traktuell.at. 2020).
Relevante Initiativen in Österreich
Auswirkungen in Bezug auf die Ziele für nachhaltige Entwicklung (SDGs)
| Ebene der Auswirkungen | Indikator | Richtung der Auswirkungen | Beschreibung des Ziels & SDG | Quelle |
|---|---|---|---|---|
| Individuell | Potenzial zur Senkung des Kaufpreises von Elektroautos mit geringerem Batteriebedarf | + | Nachhaltige wirtschaftliche Entwicklung (8,11) | Muelaner, 2020 |
| Systemisch | Verringerung der Emissionen und des Verbrauchs fossiler Brennstoffe | + | Oekologische Nachhaltigkeit (7,12,13,15) | Tongur & Sundelin, 2016; Moeller, 2017; Boerjesson et al., 2020 |
| Systemisch | Kosteneinsparung im Vergleich zu Hybridfahrzeugen; langfristige Wartungskosten ungewiss | ~ | Nachhaltige wirtschaftliche Entwicklun (8,11) | Muelaner, 2020; Boerjesson et al., 2020 |
| Systemisch | Neuartige Designs getestet | + | Innovation und Infrastruktur (9) | Kelion, 2013 |
| Systemisch | Verstaerkte branchenuebergreifende Zusammenar | + | Partnerschaften und Kooperationen (17) | Kelion, 2013; Wettengel, 2019 |
Technologie- und gesellschaftlicher Bereitschaftsgrad
| Stand der Technologiebereitschaft | Stand der Technologiebereitschaft |
|---|---|
| 5-9 | 4-7 |
Offene Fragen
- Welches Potenzial hat der Einsatz von ERS über den Güterverkehr hinaus?
- Wie können die Beteiligten neue Geschäftsmodelle entwickeln, die den Einsatz von ERS unterstützen?
- Müssen elektrischen Straßen Staatseigentum sein?
- Wie hoch sind die langfristigen Kosten im Zusammenhang mit der Wartung von ERS?
Weitere links
Referenzen
- Börjesson, M., Johansson, M., & Kågeson, P. (2020). The economics of electric roads.
- Kelion, L., 2013. South Korean road wirelessly recharges OLEV buses. BBC News. Available at: https://www.bbc.com/news/technology-23603751 [Accessed: 19 February 2021].
- Möller, C. (2017). Carbon neutral road transportation: an assessment of the potential of electrified road systems.
- Muelaner, J., 2020. Electric Road Systems. Engineering.com. Available at: https://www.engineering.com/story/electric-road-systems [Accessed: 18 February 2021].
- Tongur, S., & Sundelin, H. (2016, October). The electric road system transition from a system to a system-of-systems. In 2016 Asian Conference on Energy, Power and Transportation Electrification (ACEPT) (pp. 1-8). IEEE.
- Traktuell.at. 2020. Ohne Akzeptanz kein eHighway in Deutschland. Available at: https://traktuell.at/a/ohne-akzeptanz-kein-ehighway-in-deutschland [Accessed: 19 February 2021].
- Wettengel, J., 2019. Germany opens first overhead electricity test track for trucks on autobahn. Clean Energy Wire. Available at: https://www.cleanenergywire.org/news/germany-opens-first-overhead-electricity-test-track-trucks-autobahn [Accessed: 19 February 2021].
2.5 Fahrspuren für Fahrzeuge mit hohem Besetzungsgrad (high-occupancy vehicle - HOV)
Synonyme
Fahrzeug mit hohem Besetzungsgrad (HOV - high-occupancy vehicle), Fahrspur für Fahrgemeinschaften, Pendlerspur, Diamantspur, Expressspur, Transitspur, Maut & Vignette
Definition
High-Occupancy-Vehicle-Spuren (HOV) sind besondere Fahrspuren auf Autobahnen, die Fahrzeugen mit zwei oder mehreren Passagieren vorbehalten sind. Sie existieren seit den späten 1960er Jahren, hauptsächlich in den USA und Kanada, und sind in der Regel durch Rautensymbole auf der Fahrbahn und entsprechende Verkehrsschilder gekennzeichnet. In einigen Fällen sind auch andere Sonderfahrzeuge wie Motorräder, Transit- und Charterbusse, Not- und Polizeifahrzeuge, schadstoffarme Fahrzeuge, Hybridfahrzeuge oder Fahrzeuge mit alternativen Kraftstoffen und/oder Einzelfahrzeuge (SOV) auf den HOV-Spuren zugelassen. Diese Fahrspuren sollen die Bildung von Fahrgemeinschaften fördern (siehe ride hailing & ride sharing) und so die Auslastung der Fahrzeuge erhöhen, was zu einer höheren Verkehrseffizienz und gleichzeitig zu geringeren Emissionen führt. Die Nutzung der HOV-Spuren sollte zu einer Fahrzeitersparnis führen, die als Anreiz für Fahrgemeinschaften dient (United States Department of Transportation - Federal Highway Administration, 2008).
Wenn jedoch zeitweise zu viele (oder zu wenige) Fahrzeuge die HOV-Spuren nutzen dürfen, können Probleme auftreten, die den Anreiz zunichte machen. Änderungen an den HOV-Richtlinien können dazu beitragen, den Durchsatz zu erhöhen (United States Department of Transportation - Federal Highway Administration, 2008). Ein Beispiel sind die High Occupancy Toll (HOT) Lanes, die es Fahrzeugen, die die festgelegten Belegungsanforderungen für eine HOV-Spur nicht erfüllen, ermöglichen, sich durch Zahlung einer Maut in die Spur einzukaufen". Auf diese Weise bieten HOT-Spuren eine staufreie, zeitsparende Alternative für Reisende und verbessern die Auslastung von bisher nicht ausgelasteten HOV-Spuren. Mit Hilfe der elektronischen Mauterhebung wird die Mautgebühr variabel in der Höhe festgesetzt, die erforderlich ist, um den Geschwindigkeitsvorteil der Fahrspur zu erhalten (United States Department of Transportation - Federal Highway Administration, n.d.). Die Vorteile für die Autofahrer:innen liegen in der Verringerung von Staus in den Hauptverkehrszeiten, in der Erhöhung der Zuverlässigkeit der Reisezeiten und in der Finanzierung von Projekten zur Verbesserung der Straßen (United States Department of Transportation - Federal Highway Administration, 2021). Für die Steuerzahler:innen bieten HOT-Spuren mehr Wahlmöglichkeiten als herkömmliche Steuern, fördern die Verantwortlichkeit, indem sie die Kosten der Autofahrer:innen direkt an ihre Entscheidungen binden, und verringern die Steuernachfrage für stauvermindernde Initiativen wie den Ausbau von Straßen. Außerdem bieten sie die Möglichkeit, Mautstraßenanleihen schneller zurückzuzahlen (United States Department of Transportation - Federal Highway Administration, 2021). Darüber hinaus können HOT-Spuren die notwendigen Mittel für Verbesserungen im Transitverkehr, für Park-and-Ride-Plätze usw. generieren und einen finanziellen Anreiz bieten, um den Transitverkehr und Fahrgemeinschaften attraktiver zu machen und die Reisezeit im Transitverkehr zu verbessern, was in erster Linie Transitfahrten und Fahrgemeinschaften fördert (United States Department of Transportation - Federal Highway Administration, 2021). Unternehmen können von geringeren stauabhängigen Arbeits- und Transportkosten sowie von einer verbesserten Lebensqualität in der Region profitieren. Die Umwelt profitiert von einer geringeren Luftverschmutzung durch im Stau stehende Autos und einem geringeren Kraftstoffverbrauch durch Stop-and-Go-Verkehr (United States Department of Transportation - Federal Highway Administration, 2021).
Wichtige Interessensgruppen
- Betroffene: Fahrer:innen und Fahrgäste von Privatfahrzeugen und Fahrgemeinschaften
- Verantwortliche: Autobahnbetreiber, Kommunalverwaltungen, nationale Regierungen, Softwareanbieter, staatliche Behörden, Technologieanbieter
Aktueller Stand der Wissenschaft und Forschung
Nohekhan et al. (2021) untersuchten den Unterschied in der Reisezeit auf dem I-66 Inner Beltway durch die Umwandlung einer HOV-Spur in eine HOT-Spur und stellten fest, dass sich die Reisezeit durch die Umwandlung verkürzt. Gleichzeitig sorgt das Mautsystem für einen zuverlässigen Geldfluss, durch den wichtige Mittel für den Verkehrssektor aufgebracht werden. Burris et al. (2014) argumentieren jedoch, dass sich die Umwandlung einer HOV-Spur in eine HOT-Spur offenbar häufig negativ auf Fahrgemeinschaften auswirkt. Wang et al. (2020) haben sich mit der Tatsache befasst, dass bestehende Preisstrategien für HOT-Spuren nicht garantieren können, dass das geschlossene System zu einem optimalen Zustand konvergiert, bei dem die Kapazität der HOT-Spuren voll ausgelastet ist, es aber keine Warteschlangen auf den HOT-Spuren gibt. Eine gut funktionierende Schätz- und Steuerungsmethode ist eine große Herausforderung und immer noch schwer zu finden. In ihrem Beitrag versuchen sie, diese Lücke zu schließen, indem sie (i) eine einfachere Formulierung des Punkt-Warteschlangenmodells auf der Grundlage des neuen Konzepts der Restkapazität vorlegen, (ii) einen einfachen Ansatz der Rückkopplungssteuerungstheorie vorschlagen, um den Durchschnittswert der Zeit zu schätzen und den dynamischen Preis zu berechnen, und (iii) analytisch und numerisch nachweisen, dass das geschlossene System stabil ist und garantiert zum optimalen Zustand konvergiert, entweder auf gauß’sche oder exponentielle Weise. Boysen et al. (2021) führten eine Fallstudie darüber durch, wie die Bildung von Fahrgemeinschaften auf HOT-Spuren in Nordamerika optimiert werden könnte. Hosford et al. (2021) untersuchten die Auswirkungen von Straßenbenutzungsgebühren auf die Verkehrs- und Gesundheitsgerechtigkeit. Sie ermittelten Auswirkungen auf den Autoverkehr, die Verlagerung auf öffentliche Verkehrsmittel, die Erreichbarkeit von Reisezielen, die Erschwinglichkeit, den Wohlstand, soziale Interaktionen, die Luftverschmutzung, Verkehrsunfälle und Todesfälle, akute Asthmaanfälle und die Lebenserwartung. Im Allgemeinen deuten die vorliegenden Erkenntnisse darauf hin, dass Straßenbenutzungsgebühren weitgehend positive Nettoeffekte haben, indem sie die Zahl der Autofahrten, der Luftverschmutzung, der Asthmaanfälle und der Verkehrsunfälle verringern und die Lebenserwartung erhöhen. Die Häufigkeit und Leichtigkeit sozialer Interaktionen wurde jedoch negativ beeinflusst. Die Bevölkerungsgruppen, die in Bezug auf Verkehr und Gesundheit im Allgemeinen besser abschnitten, waren diejenigen mit höherem Einkommen, Männer und Menschen im Alter zwischen 35 und 55 Jahren. Außerdem stellte sich heraus, dass es nur wenige Auswertungen gibt, die nichtberufliche Fahrten einbeziehen, so dass die Auswirkungen für Arbeitslose oder Frauen, die eher nichtberufliche Fahrten unternehmen, möglicherweise nicht berücksichtigt wurden. Sie kamen zu dem Schluss, dass die begrenzten Belege darauf hindeuten, dass die Maut für eine Reihe von Verkehrs- und Gesundheitsergebnissen vorteilhaft ist, insbesondere für die Bevölkerung im Einzugsgebiet, dass es jedoch eine gewisse Ungleichheit bei der Verteilung von Nutzen und Lasten geben kann.
Aktueller Stand der praktischen Umsetzung
HOV-Spuren und HOT-Spuren sind in Nordamerika bereits weit verbreitet. Auch in Europa wurden bereits in den 1990er Jahren mehrere HOV-Spuren eingerichtet, z. B. in Leeds (Vereinigtes Königreich), Madrid oder Trondheim in Norwegen. Diese Beispiele haben zu einer Verkürzung der Reisezeit und einem höheren Besetzungsgrad der Fahrzeuge geführt (University of Leeds - Institute for Transport Studies, n.d.). HOT-Spuren sind jedoch noch nicht realisiert worden. Der Stand der Technik für HOT-Spuren ist der Einsatz von Sensoren, die automatisch die Anzahl der Insassen in einem Fahrzeug erkennen. Gleichzeitig werden die Mautgebühren dynamisch auf Basis der Verkehrssituation berechnet und die aktuellen Preise in Echtzeit über elektronische Verkehrsschilder angezeigt (Kapsch TrafficCom, n.d.).
Relevante Initiativen in Österreich
Auswirkungen in Bezug auf die Ziele für nachhaltige Entwicklung (SDGs)
| Ebene der Auswirkungen | Indikator | Richtung der Auswirkungen | Beschreibung des Ziels & SDG | Quelle |
|---|---|---|---|---|
| Individuell | Verkuerzte Reisezeiten mit HOVs | + | Gesundheit und Wohlbefinden (3) | United States Department of Transportation - Federal Highway Administration, 2008; University of Leeds - ITS, n.d. |
| Systemisch | Weniger Asthmaanfaelle, weniger Verkehrsunfaelle und eine hoehere Lebenserwartung | + | Gesundheit und Wohlbefinden (3) | Hosford et al., 2021 |
| Systemisch | Zusaetzlich auferlegte Kosten | - | Gleichheit (5,10) | Hosford et al., 2021 |
| Systemisch | Weniger Kraftstoffverbrauch und Luftverschmutzung | + | Oekologische Nachhaltigkeit (7,12,13,15) | Hosford et al., 2021 |
| Systemisch | Unterstuetzung der Transportinfrastrukturkosten | + | Nachhaltige wirtschaftliche Entwicklung (8,11) | Hosford et al., 2021 |
| Systemisch | Variable Preisgestaltung durch Echtzeitdaten | + | Innovation und Infrastruktur (9) | Gihub.org, 2020 |
Technologie- und gesellschaftlicher Bereitschaftsgrad
| Stand der Technologiebereitschaft | Gesellschaftlicher Bereitschaftsgrad |
|---|---|
| 7-9 | 5-7 |
Offene Fragen
- Welche langfristigen gesundheitlichen Vorteile können durch HOT-Mauterhebung erzielt werden?
- Wie könnten HOT-Spuren in Europa eingeführt werden?
- Wie können HOT-Spuren mit dem österreichischen Mautsystem kombiniert werden?
- Welche sozialen Ungleichheiten können durch HOT-Spuren entstehen und können diese kompensiert werden?
Weitere links
Referenzen
- Boysen, N., Briskorn, D., Schwerdfeger, S., & Stephan, K. (2021). Optimizing carpool formation along high-occupancy vehicle lanes. European Journal of Operational Research.
- Burris, M., Alemazkoor, N., Benz, R., & Wood, N. S. (2014). The impact of HOT lanes on carpools. Research in Transportation Economics, 44, 43-51.
- Gihub.org. (2020). Dynamic Pricing for Roadways and Parking. Available at: https://www.gihub.org/resources/showcase-projects/dynamic-pricing-for-roadways-and-parking/ [Accessed: 15 April 2021]
- Hosford, K., Firth, C., Brauer, M., & Winters, M. (2021). The effects of road pricing on transportation and health equity: a scoping review. Transport Reviews, 1-22.
- Nohekhan, A., Zahedian, S., & Sadabadi, K. F. (2021). Investigating the impacts of I-66 Inner Beltway dynamic tolling system. Transportation Engineering, 4, 100059.
- Kapsch TrafficCom. (n.d.). Kapsch TrafficCom | Managed lanes. Available at: https://www.kapsch.net/ktc/Portfolio/IMS/Congestion/Managed-lanes?lang=en-us [Accessed: 13 April 2021].
- United States Department of Transportation - Federal Highway Administration. (n.d.). High-Occupancy Toll Lanes (Partial Facility Pricing) - Congestion Pricing - FHWA Office of Operations. Available at: https://ops.fhwa.dot.gov/congestionpricing/strategies/involving_tolls/hot_lanes.htm [Accessed: 12 April 2021].
- United States Department of Transportation - Federal Highway Administration. (2008). HOV Lane Compendium - Introduction - FHWA Office of Operations. Available at: https://ops.fhwa.dot.gov/publications/fhwahop09029/sec1_introduction.htm [Accessed: 12 April 2021].
- United States Department of Transportation - Federal Highway Administration. (2021, April 14). Pricing Kit: HOT Lanes. Available at: https://www.fhwa.dot.gov/policy/otps/pricingkit.cfm#HOT [Accessed: 14 April 2021]
- University of Leeds - Institute for Transport Studies. (n.d.). High Occupancy Vehicle (HOV) Lanes: evidence on performance. Available at: http://www.its.leeds.ac.uk/projects/konsult/private/level2/instruments/instrument029/l2_029c.htm [Accessed: 14 April 2021].
- Wang, X., Jin, W. L., & Yin, Y. (2020). A Control Theoretic Approach to Simultaneously Estimate Average Value of Time and Determine Dynamic Price for High-Occupancy Toll Lanes. IEEE Transactions on Intelligent Transportation Systems.
2.6 Prioritätssysteme für den öffentlichen Verkehr
Synonyme
Vorrang für Fahrzeuge des öffentlichen Verkehrs, Vorrang für den öffentlichen Verkehr (public transport priority - PTP), Verkehrssignalvorrang (transit signal priority - TSP), Vorrang für den Straßenraum (road-space priority - RSP)
Definition
Um die Menschen zu ermutigen, öffentliche Verkehrsmittel zu benutzen und damit nachhaltiger zu reisen, ist es notwendig, dass der öffentliche Verkehr zuverlässig und effizient funktioniert. Der ÖPNV ist das effizienteste Verkehrsmittel an Kreuzungen, wenn der Unterschied in der Anzahl der Personen, die eine Kreuzung in einer bestimmten Zeit passieren können, gemessen wird. Wobei der Unterschied zwischen Autos und ÖPNV besonders hoch ist. Das Verhältnis liegt zwischen 1 zu 10 und 1 zu 20 (Schwendinger, 2019). Ein voll ausgelasteter Bus, der im Stau steht, erhöht dagegen die Reisezeit von viel mehr Fahrgästen als ein einzelner Pkw in einer ähnlichen Situation. Zeitverzögerungen aufgrund von Verkehrssignalen machen bis zu 25 % der Gesamtreisezeit von Bussen aus (Seredynski et al., 2015). Darüber hinaus werden die Energiepreise und die erzeugten Emissionen für die Betreiber des öffentlichen Verkehrs immer wichtiger, um mit dem motorisierten Individualverkehr zu konkurrieren (Gassel et al., 2012). Die Umsetzung von Prioritätsmaßnahmen für den öffentlichen Verkehr kann dazu beitragen, die Zeit- und Energieeffizienz des öffentlichen Verkehrs zu verbessern. Die durch Lichtsignalanlagen verursachten Verspätungen können durch die Einführung von Transit-Signal-Priorität (TSP) wie frühes Grün, Grünverlängerung, Phasendrehung, Phaseneinfügung und aktivierte Transitphasen zugunsten des öffentlichen Verkehrs verringert werden (Seredynski et al., 2015). TSP-Systeme können die Attraktivität des öffentlichen Verkehrs erhöhen, die Betriebskosten senken und die Auspuffemissionen und den Energieverbrauch reduzieren. Andererseits verlängern sie die Reisezeit des allgemeinen Verkehrs, weshalb die Akzeptanz begrenzt ist (Seredynski et al., 2015). Weitere weit verbreitete Systeme sind getrennte Busspuren oder unabhängige Gleise für Stadtbahnen. Diese sind vor allem in Tempo-30-Zonen relevant, damit die Fahrzeuge des öffentlichen Verkehrs von der Regelung ausgenommen werden können. Da aber Platz ein begrenztes Gut ist, sind unabhängige Fahrspuren oder Gleise nicht immer umsetzbar (Schwendinger, 2019). Für Wien ist die Bevorrangung von Fahrzeugen des öffentlichen Verkehrs von hoher Bedeutung (WIENER STADTWERKE GmbH, 2018). Die ersten Maßnahmen zur Verkürzung der Fahrzeit der Buslinie 15A am Wienerberg wurden im Herbst 2018 umgesetzt. Auch in anderen Städten wie Linz, Graz oder Innsbruck werden Maßnahmen zur Bevorzugung des öffentlichen Verkehrs immer wichtiger. In Graz haben Stadtbahnen an fast allen Ampeln eine Vorrangschaltung, während bei Buslinien ein weiterer Bedarf besteht, vor allem für jene aus dem Umland (Schwendinger, 2019). Um die E-Mobilität zu fördern, haben einige Länder Busspuren für E-Fahrzeuge eingeführt (Figenbaum et al., 2015). Die Wiener Linien sprechen sich klar gegen diese Maßnahme aus, da Autos, unabhängig von ihrem Antriebssystem, auf den Busspuren zu Verzögerungen führen und den öffentlichen Verkehr ausbremsen (WIENER STADTWERKE GmbH, 2018).
Wichtige Interessensgruppen
- Betroffene: Straßenbenutzer:innen, Benutzer:innen öffentlicher Verkehrsmittel, Betreiber öffentlicher Verkehrsmittel
- Verantwortlich: Staatliche Behörden, Betreiber von Verkehrsinfrastrukturen, Technologieanbieter
Aktueller Stand der Wissenschaft und Forschung
Die derzeitige Forschung zielt darauf ab, auf den bestehenden Lösungen wie TSP aufzubauen und schlägt sogenannte GLOSA-Fahrerassistenzsysteme (Green Light Optimal Speed Advisory) vor. Ein mehrteiliges GLOSA kann mehrere Ampeln auf der Strecke eines Busses in einer Sequenz berücksichtigen und erlaubt den Fahrer:innen, die Geschwindigkeit so anzupassen, dass der Bus bei grüner Ampel an der Kreuzung ankommt. Dadurch kann der Komfort der Fahrgäste erhöht und der Kraftstoffverbrauch sowie die Auspuffemissionen verringert werden, ohne den allgemeinen Verkehr zu beeinträchtigen (Seredynski et al., 2014). Stahlmann et al. (2018) argumentieren jedoch, dass bisher die meisten GLOSA-Simulationsstudien in Bezug auf die Kommunikationsleistung zu optimistisch sind und empfehlen eine weitere Verbesserung der GLOSA-Systeme. Darüber hinaus befassen sich die Green Light Optimal Dwell Time Advisory (GLODTA)-Systeme mit der Nutzung zusätzlicher Verweilzeit an der nahen gelegenen Bushaltestelle (Seredynski et al., 2014). Laut Seredynski & Viti (2017) können sie das Aufladen der Batterien von Elektrobussen auf der Strecke unterstützen und auch bestehende Haltestrategien ersetzen, die zur Regulierung der Pünktlichkeit des Busverkehrs eingesetzt werden. Aufgrund der begrenzten Akzeptanz von TSP-Systemen besteht weiterer Forschungsbedarf hinsichtlich der effizienten Nutzung der dem ÖPNV zur Verfügung gestellten Grünzeit. Daher liegt der Schwerpunkt auf der Verbesserung der Buserkennungsmethoden. Die neuesten TSP arbeiten mit GPS-basierten virtuellen Detektoren (VD), die die Notwendigkeit einer Erfassungsinfrastruktur auf der Straße überflüssig machen, deren Nachteil jedoch die geringe Genauigkeit ist (Seredynski et al., 2015). Haitao et al. (2019) entwickelten einen integrierten und systematischen Rahmen für die Optimierung bimodaler städtischer Netze unter Verwendung von 3D-MFDs, der die Komplexität der Bimodalität berücksichtigt, um den Verkehr effizienter zu steuern und dem öffentlichen Verkehr Vorrang zu geben. Die Ergebnisse der Bewertung zeigen, dass die vorgeschlagene Strategie in Bezug auf die Mobilität der Fahrgäste stets besser abschneidet als bestehende Perimeter-Kontrollsysteme.
Aktueller Stand der praktischen Umsetzung
Eine gängige Maßnahme ist die Anordnung von Haltestellen vor Kreuzungen, die die Stehzeit an der Ampel mit dem Fahrgastwechsel kombiniert und so zu Fahrzeitverkürzungen führt (Schwendinger, 2019).
Auf der ganzen Welt haben Bus Rapid Transit (BRT) Systeme an Popularität gewonnen. Cervero (2013) definiert sie als “busbasiertes System, das die hohen Kapazitäts- und Leistungseigenschaften von städtischen Bahnsystemen zu einem viel niedrigeren Preis nachahmt”, das entweder auf exklusiven Transitstraßen, speziellen Busspuren oder einer Art von Trennung fährt.
Was TSP betrifft, so sind die cloudbasierten Systeme, die GPS-Standorte nutzen, Standardtechnologie (siehe Abbildung 1). Es sind jedoch noch viele veraltete Systeme im Einsatz, die auf Kurzstreckenfunk basieren. Diese Systeme erfordern, dass alle Ampeln mit Empfängern ausgestattet werden. Alle Busse einer Flotte benötigen spezielle Sender und ein bordeigenes System zur Positionsbestimmung, was das System insgesamt teuer macht. Diese veraltete Technologie ist recht unzuverlässig und wartungsintensiv (SWARCO, 2021).
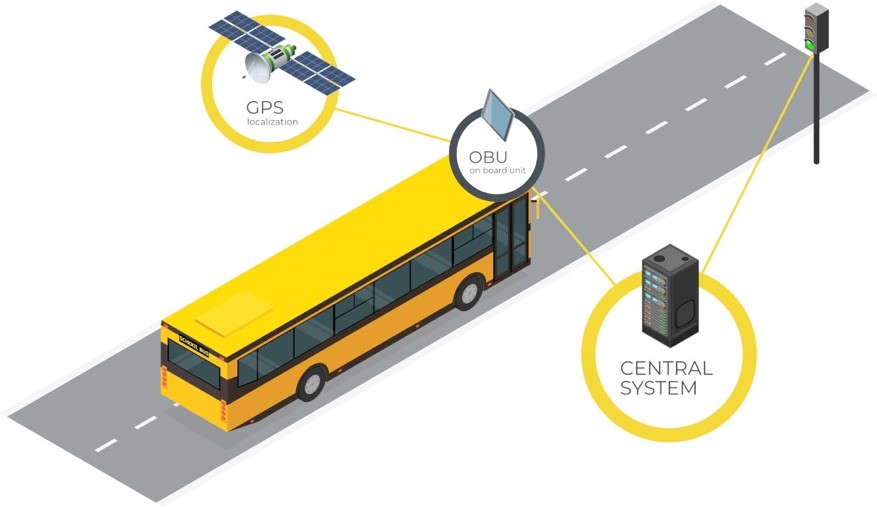
Figure 2.1: Smart priority for public transport (SWARCO, 2021)
Relevante Initiativen in Österreich
Auswirkungen in Bezug auf die Ziele für nachhaltige Entwicklung (SDGs)
| Ebene der Auswirkungen | Indikator | Richtung der Auswirkungen | Beschreibung des Ziels & SDG | Quelle |
|---|---|---|---|---|
| Individuell | Mehr Gleichheit fuer Menschen, die nicht Auto fahren | + | Gleichheit (5,10) | Litman, 2017; Cervero, 2013 |
| Individuell | Weniger Reisezeit fuer Nutzer:innen oeffentlicher Verkehrsmittel, mehr Reisezeit fuer Pkw-Nutzer | ~ | Nachhaltige wirtschaftliche Entwicklung (8,11) | Seredynski et al., 2015 |
| Systemisch | Der oeffentliche Verkehr wird im Vergleich zu anderen Verkehrstraegern wettbewerbsfaehiger | + | Gleichheit (5,10) | Schwendinger, 2019 |
| Systemisch | Weniger Kraftstoffverbrauch | + | Oekologische Nachhaltigkeit (7,12,13,15) | Gassel et al., 2012; Seredynski et al., 2015 |
| Systemisch | Der Transit ist oft der kostenguenstigste Verkehrstraeger | + | Nachhaltige wirtschaftliche Entwicklung (8,11) | Litman, 2015 |
| Systemisch | Mehr Infrastruktur fuer den oeffentlichen Verkehr | + | Innovation und Infrastruktur (9) | Cuthill et al., 2019 |
Technologie- und gesellschaftlicher Bereitschaftsgrad
| Stand der Technologiebereitschaft | Gesellschaftlicher Bereitschaftsgrad |
|---|---|
| 4-8 | 5-8 |
Offene Fragen
- Wer ist für die Einführung von PTP-Systemen verantwortlich?
- Wie werden Vehicle-to-Vehicle (V2V), Vehicle-to-Infrastructure (V2I) und in Zukunft Vehicle-to-Pedestrian (V2P) PTP-Systeme verändern?
- Wie könnten auch Einsatzfahrzeuge priorisiert werden?
- Wie geht man mit gemischten Flotten um - halb neu, halb alt?
- Was sind die Vorteile im Vergleich zu den Kosten?
- Welche Standards sollten verwendet werden?
Referenzen
- Cervero, R. (2013). Bus rapid transit (BRT): An efficient and competitive mode of public transport (No. 2013-01). Working Paper.
- Cuthill, N., Cao, M., Liu, Y., Gao, X., & Zhang, Y. (2019). The association between urban public transport infrastructure and social equity and spatial accessibility within the urban environment: An investigation of Tramlink in London. Sustainability, 11(5), 1229.
- Figenbaum, E., Fearnley, N., Pfaffenbichler, P., Hjorthol, R., Kolbenstvedt, M., Jellinek, R., … & Iversen, L. M. (2015). Increasing the competitiveness of e-vehicles in Europe. European transport research review, 7(3), 1-14.
- Gassel, C., Matschek, T., & Krimmling, J. (2012). Cooperative traffic signals for energy efficient driving in tramway systems. Aspekte der Verkehrstelematik–ausgewählte Veröffentlichungen 2012, 1.
- Haitao, H., Yang, K., Liang, H., Menendez, M., & Guler, S. I. (2019). Providing public transport priority in the perimeter of urban networks: A bimodal strategy. Transportation Research Part C: Emerging Technologies, 107, 171-192.
- Litman, T. (2015). Evaluating public transit benefits and costs. Victoria, BC, Canada: Victoria Transport Policy Institute.
- Litman, T. (2017). Evaluating Transportation Diversity. Victoria Transport Policy Institute.
- Schwendinger, M. (2019). Vorrang für Busse und Straßenbahnen in Städten. https://vcoe.at/files/vcoe/uploads/Projekte/Factsheets 2019 Neu/VCÖ-Factsheet ÖV-Bevorrangen.pdf
- Seredynski, M., Khadraoui, D., & Viti, F. (2015, October). Signal phase and timing (SPaT) for cooperative public transport priority measures. In Proc. 22nd ITS World Congress.
- Seredynski, M., Ruiz, P., Szczypiorski, K., & Khadraoui, D. (2014, May). Improving bus ride comfort using GLOSA-based dynamic speed optimisation. In 2014 IEEE International Parallel & Distributed Processing Symposium Workshops (pp. 457-463). IEEE.
- Seredynski, M., & Viti, F. (2017, October). Novel C-ITS support for electric buses with opportunity charging. In 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC) (pp. 1-6). IEEE.
- Stahlmann, R., Möller, M., Brauer, A., German, R., & Eckhoff, D. (2018). Exploring GLOSA systems in the field: Technical evaluation and results. Computer Communications, 120, 112-124.
- SWARCO. (2021). Vorrang für den ÖPNV: Öffentliche Verkehrsmittel attraktiver machen. Available at: https://www.swarco.com/de/loesungen/oeffentlicher-nahverkehr/vorrang-fuer-den-oeffentlichen-nahverkehr [Accessed: 26 January 2021]
- WIENER STADTWERKE GmbH. (2018). Wiener Linien: Autos auf Busspuren halten Öffis auf. Available at: https://www.wienerstadtwerke.at/eportal3/ep/contentView.do?pageTypeId=71954&channelId=-51313&programId=72863&contentId=4202309&contentTypeId=1001 [Accessed: 30 September 2021]
2.7 Transformation des öffentlichen Raums und digitale Lösungen
Definition
Die Digitalisierung des öffentlichen (und städtischen) Raums hat sich entwickelt und zu Konzepten wie Smart City, Wise City, U-City, intelligente Stadt usw. geführt. Die eigentliche Beschleunigung begann jedoch in den 2010er Jahren als Ergebnis von Initiativen der Industrie, die sich auf die Sammlung, Verwaltung, Verarbeitung und Echtzeitanalyse von Big Data durch die weit verbreiteten Sensoren in städtischen Räumen, die als Internet of Things (IoT)-Geräte bekannt sind, konzentrieren. In den letzten Jahren, insbesondere seit dem Ausbruch der COVID-19-Pandemie, hat die Digitalisierung der Städte ein neues Niveau erreicht. So werden beispielsweise in China digitale Systeme zur Massenüberwachung auf der Grundlage der Gesichtserkennung eingesetzt, und in anderen Teilen der Welt wurden Rechtsgrundlagen (wie die Allgemeine Datenschutzverordnung (DSGVO)) entwickelt, um die Erfassung biometrischer Daten im öffentlichen Raum zu ermöglichen (Languillon-Aussel, 2021). Über die Überwachung hinaus wird die Digitalisierung des öffentlichen Raums in vielen verschiedenen Bereichen eingesetzt, z. B. bei Zahlungen und Preisgestaltung, partizipativen Instrumenten oder der Strafverfolgung. So hat Singapur 2020 ein satellitengestütztes städtisches Mautsystem eingeführt, das die Verfolgung jedes Fahrzeugs zu jeder Tageszeit ermöglicht, um eine dynamische Preisgestaltung für die Straßennutzung und den Zonenzugang umzusetzen (Languillon-Aussel, 2021). Zu den aktuellen Ansätzen für die Digitalisierung des öffentlichen Raums gehören mobile Apps, hochauflösende Kameras, interaktive Stände und Kioske, die Dienstleistungen und Informationen anbieten, aber auch IoT-Geräte wie Sensoren und Beacons, die automatisch Daten sammeln. Diese Geräte haben das Potenzial, die Qualität und den Umfang der Dienstleistungen im öffentlichen Raum zu verbessern, die Bereitstellungs- und Lieferkosten zu senken und die Sicherheit zu erhöhen. Dennoch sind sie nicht ohne Herausforderungen. Potenzielle Probleme ergeben sich aus Datenschutz- und Sicherheitsbedenken, insbesondere wenn der private Sektor eine Schlüsselrolle spielt (Warbis, 2018), aus potenziellen technischen Schwierigkeiten wie unzuverlässigen Internetverbindungen oder instabiler Stromversorgung (Haldrup, 2018) sowie aus geringem Vertrauen unter den Mitgliedern der Gesellschaft und der so genannten digitalen Ausgrenzung bestimmter sozialer Gruppen (Durand & Zijlstra, 2020).
Wichtige Interessensgruppen
- Betroffene: Bürger:innen
- Verantwortliche: Lokale und nationale Regierungen, private Technologieunternehmen, Bürger:innen
Aktueller Stand der Wissenschaft und Forschung
Die Forschung zeigt, dass infolge der zunehmenden Digitalisierung des öffentlichen Raums und insbesondere der zunehmenden Digitalisierung des Verkehrs einige Gruppen digital ausgeschlossen werden können. Die Faktoren, die mit der Anfälligkeit in Bezug auf den Zugang zu digital gestützten Dienstleistungen und Verkehrsmitteln verbunden sind, sind:
- Alter: Ältere Menschen und Minderjährige sind aufgrund ihres geringeren Engagements für Technologie besonders benachteiligt. Im Falle der älteren Bevölkerung bedeuten die Verringerung der kognitiven Fähigkeiten und ein Rückgang der psychologischen Mechanismen, dass der Umgang mit neuen Technologien im Allgemeinen schwierig sein kann (Harvey et al., 2019; Pangbourne et al., 2010; Durand & Zijlstra, 2020). Andererseits haben Kinder häufig keinen Zugang zu digitalen Zahlungsmitteln oder können nicht alle verfügbaren Verkehrsmittel allein nutzen (Durand & Zijlstra, 2020).
- Einkommen und Bildungsniveau: Menschen mit geringerem Einkommen und Bildungsniveau sind anfälliger für digitale Ausgrenzung, wobei beispielsweise ein niederländischer Bericht zeigt, dass der Übergang vom Offline- zum Online-Kauf eines Jahresabonnements für öffentliche Verkehrsmittel für Menschen mit geringerem Einkommen problematisch ist (Durand & Zijlstra, 2020).
- Ethnische Zugehörigkeit: Personen, die Minderheiten angehören, sind tendenziell stärker benachteiligt, was jedoch häufig mit anderen Faktoren wie kulturellen Präferenzen oder wirtschaftlicher Benachteiligung zusammenhängt (Durand & Zijlstra, 2020).
Aktueller Stand der praktischen Umsetzung
Zu Beginn stützte sich die Digitalisierung von Städten und öffentlichen Räumen stark auf das verborgene, unterirdische Netz von Kabeln, Sensoren, Steckern und Masten, die im Alltag des Durchschnittsbürgers keine große Rolle spielten. Heutzutage bezieht die Digitalisierung des öffentlichen Raums das Konzept der Smart City in viel größerem Umfang in das tägliche Leben ein. Es gibt viele Möglichkeiten, wie die Digitalisierung im öffentlichen Raum umgesetzt werden kann.
Eine davon ist die verbesserte Konnektivität in Form von Wi-Fi-Hotspots und -Zonen. In New York hat LinkNYC beispielsweise Konnektivitätskorridore in fünf Bezirken mit mehr als 1700 Verbindungen eingerichtet und damit rund 5 Millionen Nutzer:innen ermöglicht sich kostenlos mit dem schnellsten und stabilsten öffentlichen Glasfasernetz des Landes zu verbinden. Durch diesen Dienst hat LinkNYC den Menschen den Zugang zu Wohltätigkeitsorganisationen, die Nutzung von Behördendiensten und sogar die Bewerbung um einen Arbeitsplatz ermöglicht (Warbis, 2018). Darüber hinaus nutzt Calvium die verbesserte Konnektivität, um durch digital-physische Reisen in die Geschichte und das Erbe einen Sinn für den Ort zu schaffen, wie etwa in der Battersea Power Station in London (Warbis, 2018).
Darüber hinaus bringt die Digitalisierung eine Transformation der öffentlichen Dienstleistungen mit sich, bei der nicht personenbezogene Daten, die im öffentlichen Raum erhoben werden, genutzt werden, um die Nutzer:innen des öffentlichen Raums und ihre Bedürfnisse besser zu verstehen, um die Räume, die Infrastruktur und die Bereitstellung öffentlicher Dienstleistungen in den Städten zu verbessern. Wenn man sich beispielsweise die Art der Geräte ansieht, die mit WiFi-Spots verbunden sind, oder wenn man sich an einem digitalen Platzgestaltungsprogramm beteiligt, kann man sozioökonomische Profile erkennen und die Stadtverwaltungen dabei unterstützen, die richtigen Dienstleistungen für die richtigen Menschen bereitzustellen.
Zwei solcher Beispiele sind (1) der (1) Borough Data Explorer, der Daten für die Indikatoren sammelt, die entweder zu den sogenannten Borough Manifesto-Zielen der Stadt beitragen oder im sozialen Fortschrittsindex der Stadt enthalten sind (Lbbd.emu-analytics.net, 2021). (2) Die australische Stadt Joondalup ist eine Partnerschaft mit Telstra eingegangen, um IoT-Technologien zu testen, mit denen Umweltfaktoren wie Temperatur, Luftfeuchtigkeit, Verschmutzung, Licht- und Lärmpegel in Echtzeit besser überwacht werden können (Barns, 2017).
Als Nächstes ist eine öffentlich-private Partnerschaft von entscheidender Bedeutung für einen starken und zuverlässigen digitalen öffentlichen Bereich, in dem Technologieunternehmen die Politik und Strategie der lokalen Regierung verstehen müssen, um Bereiche zu ermitteln, die durch den digitalen Einsatz unterstützt werden können. Auf der anderen Seite ist es für die Kommunalverwaltung wichtig, die Merkmale der einzusetzenden Technologie zu verstehen. Diese enge Zusammenarbeit ermöglicht es dem öffentlichen Sektor, die Digitalisierung von Orten so zu lenken, dass sie dem öffentlichen Wohl dient und der öffentliche Charakter von Raum und Ort erhalten bleibt, unabhängig davon, wer die eingesetzten Technologien besitzt, beaufsichtigt oder verwaltet (Warbis, 2018). Beispiele für solche Initiativen sind ÖBB360 wegfinder, Living Labs und Seestadt Wien.
Innerhalb des Verkehrsnetzes bringt die Digitalisierung Vorteile in Form von verbesserter Individualisierung, Effizienz und Komfort. Beispiele dafür sind Echtzeitinformationen über verfügbare Parkplätze wie eParkomat in der Tschechischen Republik, digitales Ticketing und Fahrplanauskunft wie, DV Ticketing oder Trainline in Großbritannien, elektronische Systeme für Car- und Bike-Sharing-Flotten wie Share-now oder Nextbike usw. Weitere Informationen über Bike- und Carsharing finden Sie in den Abschnitten über Fahrrad- und E-Bike-Verleih und Car Sharing in dieser Arbeit.
Schließlich wird behauptet, dass der öffentliche Raum eine politische Funktion hat. In Europa unterstützen und bestimmen sie den Ausdruck des Lebens in der Stadt und spielen eine Rolle bei der partizipativen Planung (Languillon-Aussel, 2021; Parkinson, 2012). So beabsichtigten beispielsweise die österreichischen Eisenbahnen (ÖBB) 2013 den Bau einesneuen Güterverkehrszentrums in Wien, das den Güterverkehr von der Straße auf die Schiene verlagern sollte. Das neue Güterverkehrszentrum sollte dasjenige am Nordwestbahnhof ersetzen. Von Anfang an sollte die Öffentlichkeit aktiv in das Projekt einbezogen werden, und die Betroffenen wurden auch stark in die Planung integriert. So gab es vor Projektbeginn eine Informationsveranstaltung der ÖBB, die von großen Protesten (der Bevölkerung) gegen das Projekt begleitet war. Die ÖBB haben wohl gerade deshalb versucht, die Entscheidungsträger:innen so intensiv in den gesamten Planungsprozess einzubinden und haben das Projekt in der Folge erfolgreich abgeschlossen.
Daher kann die Digitalisierung des städtischen Raums die Innovation bei den partizipatorischen Instrumenten beeinflussen, die es den Bürger:innen ermöglichen, ihre Meinung zu äußern und Feedback zu geben, um aktiv zum Infrastrukturplanungsprozess und zur Entscheidungsfindung beizutragen. Dieser Trend führte zur sogenannten digitalen partizipativen Planung (DPP) (Bouzguenda et al., 2020). Einige Beispiele für solche Initiativen sind die App Map your city die Ideenfindungsplattform Decide Madrid, Open Source City in den Niederlanden, die britischen Feedback-Plattformen Involve und Changify oder die Visualisierungsplattform für Argumente namens vTaiwan.
Relevante Initiativen in Österreich
Auswirkungen in Bezug auf die Ziele für nachhaltige Entwicklung (SDGs)
| Ebene der Auswirkungen | Indikator | Richtung der Auswirkungen | Beschreibung des Ziels & SDG | Quelle |
|---|---|---|---|---|
| Individuell | Verschlechterter Zugang zu digital gestuetzten Verkehrsdiensten fuer bestimmte Gruppen | - | Gleichheit (5,10) | Durand & Zijlstra, 2020 |
| Systemisch | Geringeres Risiko der verkehrsbedingten sozialen Ausgrenzung | + | Gleichheit (5,10) | Harvey et al., 2019; Pangbourne et al., 2010 |
| Systemisch | Besser informierte Planung und Entscheidungsfindung auf der Grundlage von Echtzeitdaten aus dem IoT | + | Innovation und Infrastruktur (9) | Barns, 2017, Bouzguenda et al., 2020 |
| Systemisch | Verstaerkte Zusammenarbeit zwischen oeffentlichem und privatem Sektor | + | Partnerschaften und Kooperationen (17) | Warbis, 2018; |
Technologie- und gesellschaftlicher Bereitschaftsgrad
| Stand der Technologiebereitschaft | Gesellschaftlicher Bereitschaftsgrad |
|---|---|
| 5-9 | 5-8 |
Offene Fragen
- Inwieweit wirkt sich der immer wichtigere Einsatz digitaler Geräte im öffentlichen Raum auf dessen politische Dimensionen aus?
- Verändern die digitalen Technologien die Praktiken der Bürger:innen im öffentlichen Raum und/oder ermöglichen sie das Entstehen neuer Praktiken?
- Indem sie neue Formen der Meinungsäußerung sowie der politischen und demokratischen Teilhabe im Internet ermöglichen, wird der virtuelle Raum tendenziell zu einem neuen Forum. Übernimmt die digitale Technologie die politischen Funktionen des öffentlichen Raums, der dadurch überflüssig geworden ist?
- Welche Auswirkungen haben die kurzen Lebenszyklen der Technologien und der Wechsel der Technologiegenerationen auf die Entwicklung des öffentlichen Raums?
- Verändert die Digitalisierung das Design, die Formen, die Dimensionen und die Räumlichkeit des öffentlichen Raums?
- Auf welche Weise verändert das Aufkommen neuer Werkzeuge und Fähigkeiten die Art und Weise, wie öffentliche Räume geplant und entwickelt werden?
- Welche Rolle spielen digitale Technologien bei der Darstellung, Vorstellung und Wahrnehmung von öffentlichen Räumen?
- Für welche(n) Typ(en) von Empfängern (wie Bürger:innen, Verbraucher:innen, Nutzer:innen und Bewohner:innen) werden digitale Technologien im öffentlichen Raum eingesetzt?
- Welche Auswirkungen haben sie auf die Menschen, die sich im öffentlichen Raum aufhalten?
- Fördern die digitalen Technologien den sozialen Austausch oder vervielfältigen sie im Gegenteil die Segregation der digitalen Blasen?
- Welche Rolle hat die Digitalisierung bei der Anpassung des öffentlichen Raums an die Gesundheitskrise von COVID-19 gespielt? (Languillon-Aussel, 2021)
Weitere links
Referenzen
- Barns, S. (2017) Surprise! Digital space isn’t replacing public space, and might even help make it better. Available at: https://theconversation.com/surprise-digital-space-isnt-replacing-public-space-and-might-even-help-make-it-better-87173 [Accessed: 12 April 2021].
- Bouzguenda, I., Alalouch, C., & Fava, N. (2020). Examining digital participatory planning: maturity assessment in a small Dutch city. Journal of Cleaner Production, 264, 121706.
- Durand, A. & Zijlstra, T. (2020). The impact of digitalisation on the access to transport services: a literature review. 10.13140/RG.2.2.22686.97600.
- Haldrup, S.,V. (2018). Digitising public service delivery: opportunities and limitations. Available at: https://www.opml.co.uk/blog/digitising-public-service-delivery-opportunities-and-limitations [Accessed: 12 April 2021].
- Harvey, J., Guo, W., & Edwards, S. (2019). Increasing mobility for older travellers through engagement with technology. Transportation Research Part F: Traffic Psychology and Behaviour, 60, 172-184. doi:10.1016/j.trf.2018.10.019
- Languillon-Aussel, R. (2021). Digitalisation of public spaces: the great urban change? Available at: https://journals.openedition.org/articulo/4518 . [Accessed: 9 April 2021]
- Lbbd.emu-analytics.net. (2021). Borough Data Explorer. Available at: https://lbbd.emu-analytics.net/main/(view/950db2c7-1a3b-448d-9b21-444a0ec7b5e0//rightBar:appinfo)?basemapDetail=1&zoom=4.7&lng=3.34490&lat=54.11363 [Accessed: 12 April 2021].
- Pangbourne, K. (2018). Mobility and Ageing: A Review of Interactions Between Transport and Technology from the Perspective of Older People In A. Curl & C. Musselwhite (Eds.), Geographies of Transport and Ageing (pp. 51-71). Cham: Springer International Publishing.
- Parkinson J., 2012, Democracy and Public Space: The Physical Sites of Democratic Performance, Oxford: Oxford University Press, 262 p.
- Warbis, M. (2018). Making the Spaces of Cities Smarter: Why cities (and their citizens) should embrace the digital public realm. <Available at: https://medium.com/@warbismichelle/making-the-spaces-of-cities-smarter-why-cities-should-embrace-the-digital-public-realm-c12afc810aaa>. [Accessed: 12 April 2021]